Questões de Concurso Sobre engenharia cartográfica
Foram encontradas 1.461 questões
Mapa é um produto cartográfico que pode ser definido
como uma representação da superfície da Terra, ou de
uma parte dela, que é feita em escala reduzida sobre uma
superfície plana. Em função da diversidade de
informações que podem ser especializadas e, dessa forma, expressas em um mapa, eles são categorizados.
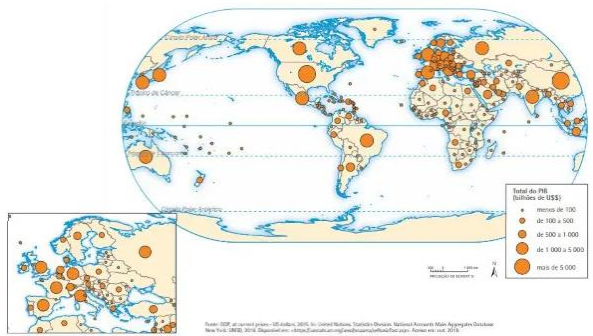
Observe a imagem do mapa: “Comparação do PIB dos
países” que encontra-se a seguir e informe a que tipo ele
pertence:
Fonte: BRASIL ESCOLA. Disponível em:
https://brasilescola.uol.com.br/geografia/os-mapas-os-graficos.htm. Acesso em:
24/08/2024.
Sobre Latitude, é CORRETO afirmar que:
I. É a distância em graus de qualquer ponto na superfície terrestre até o Meridiano de Greenwich.
II. É a distância em graus de qualquer ponto na superfície terrestre até a Linha do Equador.
III. O Equador representa o ponto inicial de contagem das latitudes e, por essa razão, é considerado o paralelo de latitude de 0°.
IV. As latitudes são sempre medidas horizontalmente, no sentido norte-sul (ou sul-norte), e variam de 0 a 90° em ambos os hemisférios.
Estão CORRETAS
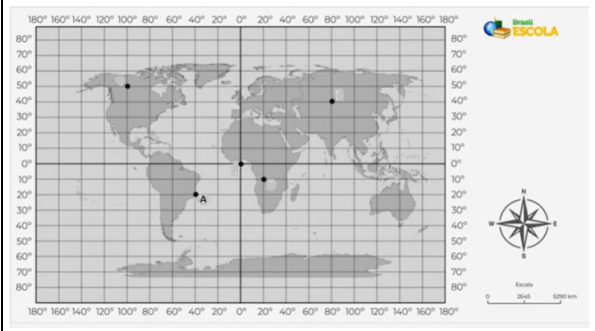
Coordenadas Geográficas são um complexo sistema de
localização espacial utilizado para apontar um
determinado objeto situado em qualquer ponto da
superfície terrestre. A partir da imagem a seguir,
assinale a alternativa que indica as coordenadas
Geográfica do Ponto A, que encontra-se em destaque:
Fonte: BRASIL ESCOLA. Disponível em:
https://mundoeducacao.uol.com.br/geografia/coordenadas-geograficas.htm.
Acesso em: 24/08/2024
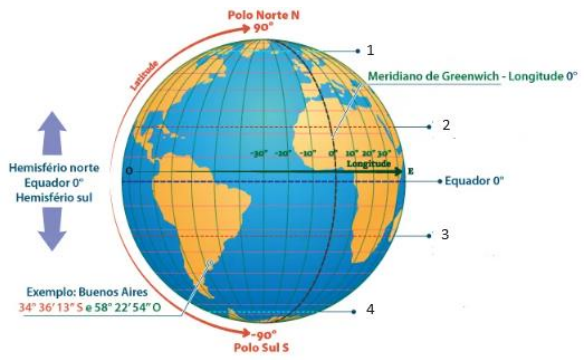
Observe a imagem a seguir e assinale
CORRETAMENTE a alternativa que indica os nomes
das coordenadas geográficas de acordo coma sequência
numérica.
Fonte: TODA MATÉRIA. Disponível em:
https://www.todamateria.com.br/coordenadas-geograficas/. Acesso em:
24/08/2024.
Ocupa-se da representação de aspectos físicos de uma área por meio de técnicas padronizadas. As características especializadas por meio das técnicas deste tipo de cartografia se alteram em intervalos de tempo muito extensos, demorando até mesmo eras geológicas para apresentarem qualquer tipo de mudança. Por conta disso, os seus mapas têm alta durabilidade temporal.
Dentre os tipos de cartografia, o conceito a seguir refere-se à:
Assinale a alternativa CORRETA:
I.Entre as restrições do sensoriamento remoto em estudos oceanográficos, estão a aquisição de dados limitada à camada superficial do mar e à interferência causada por condições atmosféricas.
II.Satélites com órbita estacionária possuem menor cobertura espacial sinótica e menor resolução temporal do que satélites com orbita polar.
III.Os satélites com órbita sincronizada com o Sol passam sobre uma dada área no mesmo horário todos os dias, o que facilita a comparação das imagens ao longo do tempo.
IV.Uma das vantagens no uso de sensoriamento remoto no estudo dos oceanos é a visão mais sinótica que a técnica fornece em comparação a levantamentos realizados com navios.
É correto o que se afirma em:
(__)Sensores passivos dependem da radiação emitida pela superfície terrestre ou da radiação proveniente de fontes naturais (como o Sol) refletida pela superfície da Terra. (__)Sensores ativos têm capacidade de operação limitada em altitudes elevadas, estando limitados a plataformas aéreas, como aviões e drones. (__)Sensores passivos medem a radiação apenas na faixa espectral visível (comprimentos entre 400 nm e 700 nm). (__)Sistemas que utilizam laser (LIDAR) para medição da batimetria em áreas rasas são um exemplo de sensores do tipo ativo.
Assinale a alternativa que apresenta a sequência correta:
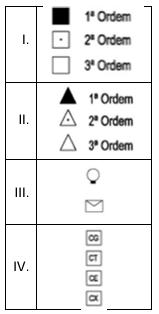
Assinale a alternativa que apresenta a correspondência CORRETA:
I. O UTM é um sistema de projeção cartográfica e corresponde a uma modificação da projeção de Mercator, onde o cilindro secante é colocado em posição transversal.
II. O sistema é constituído por 60 fusos de 3º de longitude, numerados a partir do antimeridiano de Greenwich, seguindo de oeste para leste.
III. O eixo central do fuso, denominado como meridiano central, estabelece, junto com a linha do Equador, a origem do sistema de coordenadas de cada fuso.
IV. O fator de escala "K" ou coeficiente deformação linear é variável conforme o afastamento em relação ao Meridiano Central.
V. O valor do fator de escala "K" ou coeficiente deformação linear sobre as linhas de secância é igual a 0,9996.
Assinale a alternativa CORRETA:
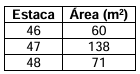
Utilizando o método da área média, o volume total de aterro entre as estacas 46 e 48 é igual a:
I. Os sistemas englobados pelo GNSS incluem: NAVSTAR-GPS (NAVigation System with Timing And Ranging – Global Positioning System), sistema norte-americano; GLONASS (Globalnaya Navigatsionnaya Sputnikovaya Sistema), sistema russo; Galileo, sistema europeu; e Compass/Beidou (China’s Compass Navigation Satellite System – CNSS), sistema chinês.
II. No posicionamento relativo, as coordenadas do vértice de interesse são determinadas a partir de um ou mais vértices de coordenadas conhecidas. Para isso, é necessário que dois ou mais receptores GNSS coletem dados simultaneamente, sendo que ao menos um dos receptores ocupe um vértice de referência.
III. O conceito de posicionamento pelo RTK (Real Time Kinematic) e DGPS (Differential GPS) baseia-se na transmissão de dados pós-processamento de correções dos sinais de satélites, a partir de receptores instalados nos pontos de referência para os receptores móveis que percorrem os pontos de interesse.
IV. No sistema RTK em rede, há apenas uma estação de referência de monitoramento contínuo, que está conectada a um servidor central, que distribui os dados de correção para os receptores móveis via Internet.
V. No posicionamento por ponto preciso (Precise Point Positioning - PPP), as coordenadas do vértice de interesse são determinadas de forma absoluta utilizando efemérides precisas, dispensando o uso de receptor instalado sobre um vértice de coordenadas conhecidas.
VI. O Posicionamento por Ponto Preciso em Tempo Real (Real Time Precise Point Positioning - PPP RTK) é um método que permite determinar as coordenadas de um ponto de interesse de forma absoluta utilizando correções transmitidas em tempo real por uma rede geodésica global, com a utilização de apenas um receptor ao nível do usuário.
Assinale a alternativa CORRETA:
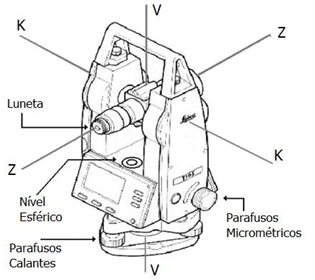
I. A coletânea ISSO 17123 especifica os procedimentos, simplificado e completo, a serem adotados para a determinação e avaliação da precisão dos instrumentos topográficos e seus equipamentos auxiliares. Foi desenvolvida para aplicações in loco, sem a necessidade de equipamento especial, e projetada para minimizar as influências atmosféricas.
II. Os medidores de ângulos e os níveis devem ser ensaiados de acordo com as ISO 17123-2 e ISO 17123-3, em entidades competentes.
III. Os medidores eletrônicos de distância (MED) das estações totais (ET) devem ser aferidos a cada dois anos ou com maior frequência, conforme necessário, por entidades competentes. O laudo deve incluir o valor da constante aditiva Z (erro de zero) com seu desvio-padrão e o fator de escala k = 10−6, com seu desvio-padrão.
IV. Exemplos de entidades competentes para verificação e calibração de instrumentos topográficos incluem entidades oficiais, laboratórios da Rede Brasileira de Laboratórios de Ensaio (RBLE), excluindo as universidades.
Assinale a alternativa CORRETA:
A partir dessas informações, assinale a alternativa INCORRETA: