Questões de Concurso Sobre engenharia cartográfica
Foram encontradas 1.636 questões
Ano: 2024
Banca:
COMVEST UFAM
Órgão:
UFAM
Prova:
COMVEST UFAM - 2024 - UFAM - Técnico de Laboratório: Cartografia |
Q3024903
Engenharia Cartográfica
É INCORRETO afirmar que topografia:
Ano: 2024
Banca:
COMVEST UFAM
Órgão:
UFAM
Prova:
COMVEST UFAM - 2024 - UFAM - Técnico de Laboratório: Cartografia |
Q3024902
Engenharia Cartográfica
O modelo de superfície terrestre comumente adotado
em cartografia é o:
Ano: 2024
Banca:
COMVEST UFAM
Órgão:
UFAM
Prova:
COMVEST UFAM - 2024 - UFAM - Técnico de Laboratório: Cartografia |
Q3024901
Engenharia Cartográfica
De acordo com a NBR 13.133/2021, na concepção de
desenhos topográficos, o erro de graficismo, ou seja,
o erro máximo admissível na elaboração de desenho
topográfico para lançamento de pontos e traçados de
linhas equivale a duas vezes a acuidade visual, que é
de:
Ano: 2024
Banca:
COMVEST UFAM
Órgão:
UFAM
Prova:
COMVEST UFAM - 2024 - UFAM - Técnico de Laboratório: Cartografia |
Q3024900
Engenharia Cartográfica
É necessário representar uma rua com 600 metros de
comprimento real em uma planta de loteamento
urbano, utilizando a escala 1:2.500. A extensão dessa
rua na planta citada é de:
Ano: 2024
Banca:
COMVEST UFAM
Órgão:
UFAM
Prova:
COMVEST UFAM - 2024 - UFAM - Técnico de Laboratório: Cartografia |
Q3024899
Engenharia Cartográfica
Quando necessário, adote os seguintes valores:
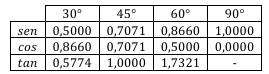
Um trecho de rodovia com 750 m de extensão e 30 m de desnível total deve ser representado em um perfil
topográfico em uma folha de formato A4 (297 mm ×
210 mm). As escalas horizontal (EH) e vertical (EV)
mais adequadas para essa representação são:
Ano: 2024
Banca:
FURB
Órgão:
Prefeitura de Florianópolis - SC
Prova:
FURB - 2024 - Prefeitura de Florianópolis - SC - Fiscal de Meio Ambiente |
Q3018428
Engenharia Cartográfica
Um Sistema de Informações Geográficas (SIG) é uma
ferramenta utilizada para realizar operações sobre dados
geográficos em ambiente computacional, e que tem por
objetivo resolver problemas espaciais e auxiliar na
tomada de decisão. Nesse contexto, analise as
afirmações a seguir relacionadas a tipos de modelos de
dados utilizados em SIG:
I.Relacionamentos topológicos são propriedades não métricas de objetos geográficos, que permanecem constantes quando o espaço geográfico dos objetos é distorcido. II.As TIN (Rede Triangular Irregular, em português) são um tipo de informação associado ao modelo de dados matricial. III. Pontos, linhas e polígonos são feições geométricas comumente utilizadas no modelo de dados vetorial. IV.O modelo de dados de objetos, com foco nas coleções de objetos geográficos e seus relacionamentos, já não é mais utilizado em SIG.
É correto o que se afirma em:
I.Relacionamentos topológicos são propriedades não métricas de objetos geográficos, que permanecem constantes quando o espaço geográfico dos objetos é distorcido. II.As TIN (Rede Triangular Irregular, em português) são um tipo de informação associado ao modelo de dados matricial. III. Pontos, linhas e polígonos são feições geométricas comumente utilizadas no modelo de dados vetorial. IV.O modelo de dados de objetos, com foco nas coleções de objetos geográficos e seus relacionamentos, já não é mais utilizado em SIG.
É correto o que se afirma em:
Ano: 2024
Banca:
FURB
Órgão:
Prefeitura de Florianópolis - SC
Prova:
FURB - 2024 - Prefeitura de Florianópolis - SC - Fiscal de Meio Ambiente |
Q3018414
Engenharia Cartográfica
Avalie as afirmações apresentadas a seguir sobre
Cartografia Temática e assinale V, para as verdadeiras,
e F, para as falsas:
(__)Os elementos gráficos básicos utilizados na representação cartográfica são o ponto, a linha, a área e a imagem. (__)Os objetos ou fenômenos geográficos podem ser representados a partir de relações quantitativas, de ordem e qualitativas. (__)As variáveis visuais comumente utilizadas na representação temática são: cor, forma, granulação, orientação, tamanho e valor.
Assinale a alternativa que apresenta a sequência correta:
(__)Os elementos gráficos básicos utilizados na representação cartográfica são o ponto, a linha, a área e a imagem. (__)Os objetos ou fenômenos geográficos podem ser representados a partir de relações quantitativas, de ordem e qualitativas. (__)As variáveis visuais comumente utilizadas na representação temática são: cor, forma, granulação, orientação, tamanho e valor.
Assinale a alternativa que apresenta a sequência correta:
Ano: 2024
Banca:
IVIN
Órgão:
Prefeitura de Santarém - PA
Prova:
IVIN - 2024 - Prefeitura de Santarém - PA - Condutor de Embarcação de Pequeno Porte |
Q3014053
Engenharia Cartográfica
Presente na maioria das embarcações, a bússola
constitui instrumento fundamental para a
orientação náutica. A respeito dela é possível fazer
as seguintes generalizações:
I. Sempre aponta para o norte magnético da Terra.
II. Sempre aponta para o norte geográfico da Terra.
III. Funciona a partir de uma base com uma agulha imantada.
Está correto o que se afirma em:
I. Sempre aponta para o norte magnético da Terra.
II. Sempre aponta para o norte geográfico da Terra.
III. Funciona a partir de uma base com uma agulha imantada.
Está correto o que se afirma em:
Ano: 2024
Banca:
IVIN
Órgão:
Prefeitura de Santarém - PA
Prova:
IVIN - 2024 - Prefeitura de Santarém - PA - Auxiliar Condutor de Embarcação de Pequeno Porte |
Q3013901
Engenharia Cartográfica
No que se refere ao GPS (do ing. Global
Positioning System), é aceitável fazer as seguintes
afirmações, com exceção de uma. Marque-a:
Ano: 2024
Banca:
CESPE / CEBRASPE
Órgão:
CAGEPA - PB
Prova:
CESPE / CEBRASPE - 2024 - CAGEPA - PB - Tecnólogo em Geoprocessamento |
Q3009958
Engenharia Cartográfica
Clientes WebGIS
Ano: 2024
Banca:
CESPE / CEBRASPE
Órgão:
CAGEPA - PB
Prova:
CESPE / CEBRASPE - 2024 - CAGEPA - PB - Tecnólogo em Geoprocessamento |
Q3009957
Engenharia Cartográfica
Considerando um SBDG com linguagem SQL, assinale a opção
em que é apresentada a consulta espacial utilizada para
determinar se dois objetos geométricos se sobrepõem.
Ano: 2024
Banca:
CESPE / CEBRASPE
Órgão:
CAGEPA - PB
Prova:
CESPE / CEBRASPE - 2024 - CAGEPA - PB - Tecnólogo em Geoprocessamento |
Q3009955
Engenharia Cartográfica
Um sistema de gerenciamento de banco de dados (SGBD)
I tem como uma de suas funções o armazenamento de dados. II permite a realização de operações de CRUD. III executa operações de segurança e controle de acesso de dados. IV executa backup e recuperação de dados.
Assinale a opção correta.
I tem como uma de suas funções o armazenamento de dados. II permite a realização de operações de CRUD. III executa operações de segurança e controle de acesso de dados. IV executa backup e recuperação de dados.
Assinale a opção correta.
Ano: 2024
Banca:
CESPE / CEBRASPE
Órgão:
CAGEPA - PB
Prova:
CESPE / CEBRASPE - 2024 - CAGEPA - PB - Tecnólogo em Geoprocessamento |
Q3009953
Engenharia Cartográfica
Tendo em vista que Python é uma linguagem de programação
amplamente utilizada para geoprocessamento devido à sua
simplicidade e versatilidade e à vasta gama de bibliotecas
disponíveis para manipulação de dados geoespaciais, assinale a
opção correta acerca da aplicação dessa linguagem na área de
geoprocessamento.
Ano: 2024
Banca:
CESPE / CEBRASPE
Órgão:
CAGEPA - PB
Prova:
CESPE / CEBRASPE - 2024 - CAGEPA - PB - Tecnólogo em Geoprocessamento |
Q3009952
Engenharia Cartográfica
Assinale a opção correta a respeito dos componentes,
ferramentas e estrutura organizacional envolvidos no processo de
publicação de dados geográficos na Internet.
Ano: 2024
Banca:
CESPE / CEBRASPE
Órgão:
CAGEPA - PB
Prova:
CESPE / CEBRASPE - 2024 - CAGEPA - PB - Tecnólogo em Geoprocessamento |
Q3009951
Engenharia Cartográfica
Acerca de banco de dados geográficos (BDG), assinale a opção
correta.
Ano: 2024
Banca:
CESPE / CEBRASPE
Órgão:
CAGEPA - PB
Prova:
CESPE / CEBRASPE - 2024 - CAGEPA - PB - Tecnólogo em Geoprocessamento |
Q3009950
Engenharia Cartográfica
Com relação ao modelo digital de terreno (MDT), que representa
a superfície topográfica de uma determinada região do planeta,
assinale a opção correta.
Ano: 2024
Banca:
CESPE / CEBRASPE
Órgão:
CAGEPA - PB
Prova:
CESPE / CEBRASPE - 2024 - CAGEPA - PB - Tecnólogo em Geoprocessamento |
Q3009948
Engenharia Cartográfica
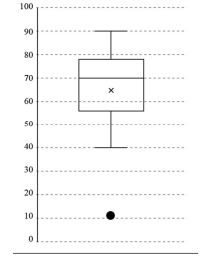
Com base no gráfico boxplot precedente, que ilustra as notas
obtidas por um grupo de estudantes de determinada escola,
assinale a opção correta.
Ano: 2024
Banca:
CESPE / CEBRASPE
Órgão:
CAGEPA - PB
Prova:
CESPE / CEBRASPE - 2024 - CAGEPA - PB - Tecnólogo em Geoprocessamento |
Q3009947
Engenharia Cartográfica
A tabela a seguir mostra a média e o desvio-padrão do teor de
argila de 100 amostras de solos coletados em cinco regiões
diferentes.
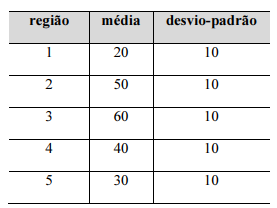
De acordo com essas informações, a região da qual as amostras apresentaram a maior homogeneidade quanto ao de teor de argila foi a região
De acordo com essas informações, a região da qual as amostras apresentaram a maior homogeneidade quanto ao de teor de argila foi a região
Ano: 2024
Banca:
CESPE / CEBRASPE
Órgão:
CAGEPA - PB
Prova:
CESPE / CEBRASPE - 2024 - CAGEPA - PB - Tecnólogo em Geoprocessamento |
Q3009946
Engenharia Cartográfica
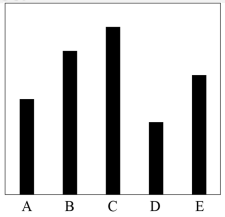
Considerando que os valores das cinco barras do histograma da
figura precedente correspondem a 15, 20, 25, 30 e 35, assinale a
opção que melhor representa os respectivos valores dos atributos
A, B, C, D e E.
Ano: 2024
Banca:
CESPE / CEBRASPE
Órgão:
CAGEPA - PB
Prova:
CESPE / CEBRASPE - 2024 - CAGEPA - PB - Tecnólogo em Geoprocessamento |
Q3009945
Engenharia Cartográfica
O histograma a seguir mostra a porcentagem de ocorrência de
sete classes de uso e cobertura de terras, denominadas
sequencialmente de A a G.
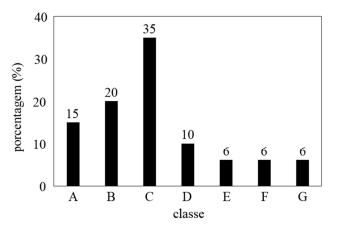
De acordo com esse gráfico, o valor da mediana é igual a
De acordo com esse gráfico, o valor da mediana é igual a