Questões de Concurso
Sobre sensoriamento remoto em engenharia cartográfica
Foram encontradas 148 questões
Ano: 2010
Banca:
CESGRANRIO
Órgão:
IBGE
Prova:
CESGRANRIO - 2010 - IBGE - Analista de Planejamento - Geoprocessamento |
Q543490
Engenharia Cartográfica
“Na realidade, pode-se usar quaisquer três bandas para
se produzir uma composição colorida. (...) Nunca se deve
aceitar 'receitas' de composições coloridas de determinadas
bandas em determinadas cores." (Crósta, 1992, p. 63).
A vegetação de cor verde reflete intensamente a energia
eletromagnética no comprimento de onda relativo ao
infravermelho.
Nessa perspectiva, qual é a combinação correta entre bandas e cores (RGB), na qual uma área de floresta densa apareça verde na composição colorida?
Nessa perspectiva, qual é a combinação correta entre bandas e cores (RGB), na qual uma área de floresta densa apareça verde na composição colorida?
Ano: 2010
Banca:
CESGRANRIO
Órgão:
IBGE
Prova:
CESGRANRIO - 2010 - IBGE - Analista de Planejamento - Geoprocessamento |
Q543489
Engenharia Cartográfica
Analise o histograma abaixo.
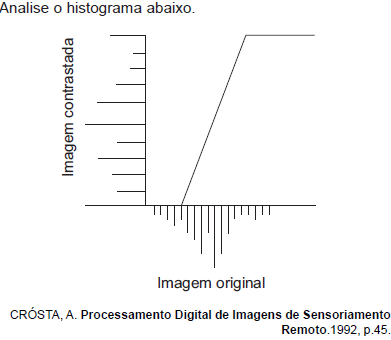
O histograma ilustra um procedimento de aumento de contraste de uma imagem de satélite. Esse procedimento é denominado aumento
O histograma ilustra um procedimento de aumento de contraste de uma imagem de satélite. Esse procedimento é denominado aumento
Ano: 2010
Banca:
CESGRANRIO
Órgão:
IBGE
Prova:
CESGRANRIO - 2010 - IBGE - Analista de Planejamento - Geoprocessamento |
Q543488
Engenharia Cartográfica
O RADARSAT possibilita obter imagens através de nuvens, chuva, neblina e fumaça e, parcialmente, através de algumas coberturas vegetais, águas rasas e areias não consolidadas.
O aspecto do RADARSAT que possibilita a obtenção dessas imagens é denominado
Ano: 2010
Banca:
CESGRANRIO
Órgão:
IBGE
Prova:
CESGRANRIO - 2010 - IBGE - Analista de Planejamento - Geoprocessamento |
Q543487
Engenharia Cartográfica
Tendo em vista a interpretação de imagens do LANDSAT,
são reconhecidas as seguintes características e aplicações:
• apresenta sensibilidade ao teor de umidade das plantas, podendo-se observar estresse na vegetação causado por desequilíbrio hídrico;
• apresenta grande sensibilidade à presença de sedimentos em suspensão, em corpos líquidos;
• apresenta sensibilidade à morfologia do relevo, permitindo obter informações sobre geomorfologia, geologia e solos.
Essas características e aplicações referem-se, respectivamente, às seguintes bandas do LANDSAT:
• apresenta sensibilidade ao teor de umidade das plantas, podendo-se observar estresse na vegetação causado por desequilíbrio hídrico;
• apresenta grande sensibilidade à presença de sedimentos em suspensão, em corpos líquidos;
• apresenta sensibilidade à morfologia do relevo, permitindo obter informações sobre geomorfologia, geologia e solos.
Essas características e aplicações referem-se, respectivamente, às seguintes bandas do LANDSAT:
Ano: 2010
Banca:
CESGRANRIO
Órgão:
IBGE
Prova:
CESGRANRIO - 2010 - IBGE - Analista de Planejamento - Geoprocessamento |
Q543483
Engenharia Cartográfica
Para o registro de dados, podem ser empregadas escalas
de medição distintas. Em mapas de uso e cobertura do solo,
emprega-se a escala
Ano: 2010
Banca:
CESGRANRIO
Órgão:
IBGE
Prova:
CESGRANRIO - 2010 - IBGE - Analista de Planejamento - Geoprocessamento |
Q543480
Engenharia Cartográfica
Por meio de um Sistema de Informação Geográfica, é
possível fazer o monitoramento do avanço de uma
mancha de óleo no mar. Esse monitoramento é melhor
representado pelo formato
Ano: 2010
Banca:
CESGRANRIO
Órgão:
IBGE
Prova:
CESGRANRIO - 2010 - IBGE - Analista de Planejamento - Geoprocessamento |
Q543477
Engenharia Cartográfica
Devido à resolução temporal mais refinada, um determinado
satélite possibilita melhor detecção e monitoramento detalhado
de tempestades severas e de mudanças bruscas nos
estados da atmosfera. Trata-se do satélite
Ano: 2010
Banca:
CESGRANRIO
Órgão:
IBGE
Prova:
CESGRANRIO - 2010 - IBGE - Analista de Planejamento - Geoprocessamento |
Q543476
Engenharia Cartográfica
Existe um satélite que detém sensor com maior sensibilidade para captar pequenas diferenças de radiação, possibilitando maior poder de contraste e de discriminação dos alvos nas imagens, ou seja, possui a melhor resolução radiométrica.
Esse satélite é o
Ano: 2010
Banca:
PaqTcPB
Órgão:
Prefeitura de Patos - PB
Prova:
PaqTcPB - 2010 - Prefeitura de Patos - PB - Engenheiro Cartógrafo |
Q215587
Engenharia Cartográfica
Com o avanço das tecnologias espaciais nos últimos anos, surgiram satélites de recurso terrestre de alta resolução espacial, cujos dados são utilizados mais freqüentemente na Cartografia, para mapeamentos dos espaços geográficos e sociais, e como ferramenta de atualização de dados. Assinale na lista abaixo, o satélite que tem a resolução espacial de 1 metro.
Q198427
Engenharia Cartográfica
O processamento do método semianalítico de aerotriangulação é definido por uma sequência lógica, caracterizando as seguintes fases de trabalho:
Q198421
Engenharia Cartográfica
Oimageamento ativo pormicro-ondas é obtido usando-se instrumentos e princípios diferentes dos utilizados pelos sensores passivos. Pode-se afirmar quanto aos componentes dos sensores ativos que:
Q198415
Engenharia Cartográfica
Quando recomendamos imagens de sensoriamento remoto para a geração de mapeamentos temos que nos preocupar com o atendimento à escala desejada com relação à resolução nominal e a exatidão alcançada com a sua correção geométrica. Considerando-se que o menor detalhe percebido em um mapa equivale a 0,3mm na sua escala, analise as resoluções espaciais dos sensores abaixo e indique as que atenderiam às escalas 1:10.000, 1:50.000, 1:100.000, respectivamente. Considere ainda que questões relativas à exatidão planimétrica, neste caso, sejam satisfatórias.
Q198414
Engenharia Cartográfica
Em estudos com sensoriamento remoto no infravermelho termal é muito importante ter conhecimento sobre a emissividade dos alvos, sabendo que ela pode ser influenciada por diversos fatores. Considerando-se a cor e o teor de umidade como fatores importantes, pode-se justificá-los pelas seguintes razões:
Q198413
Engenharia Cartográfica
A base sobre a qual se assenta a aquisição de informações em Sensoriamento Remoto é a interação entre energia e matéria. Com relação à afirmativa, assinale a alternativa correta.
Ano: 2010
Banca:
FUNCAB
Órgão:
IDAF-ES
Prova:
FUNCAB - 2010 - IDAF-ES - Analista de Sistemas de Informação Geográficas |
Q198157
Engenharia Cartográfica
Em Sensoriamento Remoto cada sensor é projetado para fornecer dados com diferentes tipos de resoluções que irão influenciar no tipo de imagem. Em relação a estas resoluções,marque a afirmativa correta.
Ano: 2010
Banca:
FUNCAB
Órgão:
IDAF-ES
Prova:
FUNCAB - 2010 - IDAF-ES - Analista de Sistemas de Informação Geográficas |
Q198151
Engenharia Cartográfica
Sobre a geotecnologia de Sensoriamento Remoto pode-se afirmar que:
Ano: 2010
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2010 - Petrobras - Técnico de Exploração de Petróleo Júnior |
Q188680
Engenharia Cartográfica
Um dos propósitos do Sensoriamento Remoto é identificar a natureza e, se possível, as propriedades dos alvos que se encontram sobre a superfície terrestre a partir do estudo da sua interação com a energia eletromagnética, que é refletida ou emitida por eles, atravessa a atmosfera e é captada pelo sensor. Nesse contexto, janelas atmosféricas são definidas como
Ano: 2010
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2010 - Petrobras - Técnico de Exploração de Petróleo Júnior |
Q188679
Engenharia Cartográfica
Sensores hiperespectrais, também chamados de espectrômetros imageadores, realizam a coleta simultânea de dados em numerosas bandas espectrais estreitas e contíguas. Seu componente fundamental é o sistema de dispersão da radiação eletromagnética que permite decompor essa radiação em pequenos intervalos de comprimento de onda. Esses sensores podem operar nas seguintes regiões espectrais:
I - visível;
II - infravermelho próximo;
III - infravermelho médio;
IV - micro-ondas.
É(São) região(ões) espectral(ais) em que os Sensores Hiperespectrais operam APENAS a(s) apresentada(s) em
I - visível;
II - infravermelho próximo;
III - infravermelho médio;
IV - micro-ondas.
É(São) região(ões) espectral(ais) em que os Sensores Hiperespectrais operam APENAS a(s) apresentada(s) em
Ano: 2010
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2010 - Petrobras - Técnico de Exploração de Petróleo Júnior |
Q188678
Engenharia Cartográfica
Para a obtenção de imagens de Sensoriamento Remoto, é utilizada radiação eletromagnética. Nessa perspectiva, analise as fontes de radiação a seguir.
I - Sol
II - Corpo Negro
III - Terra
IV - O próprio sensor
Em Sensoriamento Remoto utilizam-se APENAS as fontes de radiação:
I - Sol
II - Corpo Negro
III - Terra
IV - O próprio sensor
Em Sensoriamento Remoto utilizam-se APENAS as fontes de radiação:
Ano: 2010
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2010 - Petrobras - Técnico de Exploração de Petróleo Júnior |
Q188677
Engenharia Cartográfica
Na coluna à esquerda da tabela abaixo, aparecem os nomes de diferentes sistemas sensores, na coluna do meio são indicados o número e a largura (em nm e/ou em μm) da(s) banda(s) espectral(ais) em que os sensores operam, enquanto na coluna à direita são indicadas as resoluções espaciais correspondentes.
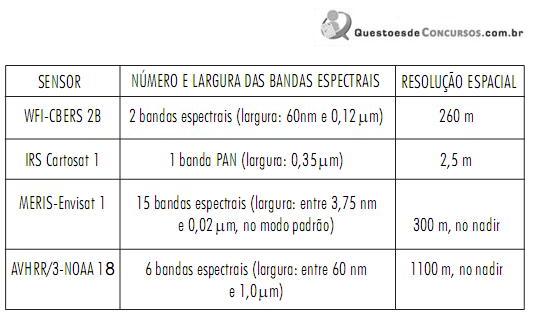
Entre os sistemas sensores mencionados acima, os de melhor resolução espectral e espacial são, respectivamente,
Entre os sistemas sensores mencionados acima, os de melhor resolução espectral e espacial são, respectivamente,