Questões de Concurso
Sobre posicionamento espacial em engenharia de agrimensura
Foram encontradas 38 questões
I. Differential GPS (DGPS). II. RTK em rede. III. Trilateração. IV. Posicionamento por Ponto Preciso (PPP).
Quais estão corretos?
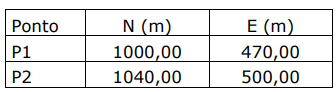
A distância entre os pontos são, em metros (m):
De acordo com Alves e Silva (2016), diferentes métodos de observação de dados GNSS podem ser aplicados no levantamento topográfico. Levando em consideração a afirmativa acima, relacione adequadamente as colunas a seguir.
1. Posicionamento diferencial.
2. Posicionamento cinemático.
3. Posicionamento relativo estático.
4. Levantamento pseudocinemático.
( ) O DGPS é um processo que envolve a utilização simultânea de dois ou mais receptores. Um receptor ocupa uma estação denominada base, em que há um ponto de coordenadas precisas determinadas em levantamento anterior, e o outro receptor denominado “rover” é utilizado na ocupação de estações de coordenadas desconhecidas.
( ) Método que requer o uso simultâneo de dois ou mais receptores e produz precisão posicional de poucos centímetros, funcionando melhor com receptores de dupla frequência.
( ) Método de posicionamento utilizado para obter elevada acurácia, utilizam-se dois ou mais receptores. Observação simultânea de “rover” e base são realizadas por um período de aproximadamente uma hora, que pode variar de acordo com a distância da linha de base e tempo de registro dos dados no receptor.
( ) Método conhecido como método intermitente ou de reocupação, requer pelo menos dois receptores. Duas sessões de observação relativamente curta, de, aproximadamente, cinco minutos são conduzidas com o “rover” em cada estação.
A sequência está correta em
A escala nominal das imagens resultantes desse levantamento foi 1:1000. A câmera RGB empregada, tem as seguintes especificações: resolução de 5 megapixels (2560 por 1920 pixels); distância focal de 10cm; sensor CCD com dimensões 8,8 por 6,6mm, sendo a dimensão de cada pixel 0,0034mm.
Assinale a opção que indica a dimensão nominal do GSD (Ground Sample Distance) das imagens obtidas neste levantamento.
I- PDOP é o indicativo de precisão da posição em 3D e tem como parâmetro três coordenadas.
II- Quando mais que 4 satélites estão visíveis, pode ser feito um ajustamento por mínimos quadrados. Quanto maior o número de satélites disponíveis, melhor a solução. O critério DOP pode também ser usado para encontrar os 4 melhores satélites, entre os vários disponíveis, numa determinada constelação geométrica.
III- O PDOP é inversamente proporcional ao volume da pirâmide cujos vértices são 4 satélites observados e o receptor e quanto mais elevados os satélites, a partir do horizonte, melhor a qualidade da medição.
Assinale a alternativa correta:
Analise as assertivas abaixo e assinale o que for correto:
I- Receptor de GPS - Nada mais é do que um aparelho que mostra sua posição, hora e outros recursos que variam de aparelho para aparelho.
II- Espacial - é composto de vinte e sete satélites que se encontram em órbita. Vinte e quatro deles estão ativos e três são os “reservas”, que entram em operação, caso ocorra alguma falha com um dos satélites principais.
III- Controle - nada mais é do que estações de controle dos satélites. Ao todo são cinco estações espalhadas pelo globo terrestre. A função principal delas é atualizar a posição atual dos satélites e sincronizar o relógio atômico presente em cada um dos satélites.
I – O norte geográfico é também conhecido como “norte verdadeiro”.
II – O norte magnético é o norte indicado pela bússola.
III – O norte magnético é muito utilizado na navegação, mas não na astronomia.
( ) É possível obter a convergência meridiana pelas coordenadas elipsoidicas geodésicas ou por coordenadas planas, sobre o plano UTM.
( ) É possível determinar a convergência meridiana por meio do Posicionamento por Ponto Preciso (PPP).
( ) A redução angular é a conversão dos ângulos e da distância de uma superfície curva para plana.
A ordem correta de preenchimento dos parênteses, de cima para baixo, é:
I. É necessário que o usuário informe ao PPP o formato do arquivo, sendo aceito formato RINEX ou HATANAKA, informar se o levantamento foi realizado em modo estático ou cinemático, modelo e altura da antena e um e-mail válido.
II. É um posicionamento relativo, pois depende de uma base para determinação do rover.
III. Utilizam-se as observáveis, pseudodistâncias e/ou fase de onda portadora oriundas de receptores GNSS com efemérides precisas.
IV. Sua utilização se aplica tanto para receptores de simples quanto de dupla frequência, sem influenciar na precisão.
Quais estão corretas?
I. Indica a instabilidade da geometria dos satélites na posição do receptor GNSS.
II. É um fator multiplicativo que relaciona o ruído da medição e da solução.
III. É proporcional a precisão.
IV. Varia em relação ao ponto coletado em função das obstruções que influenciam no ruído e propagação do sinal.
Quais estão corretas?