Questões de Concurso
Sobre clp e linguagens de automação em mecatrônica
Foram encontradas 6 questões
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Técnico de Laboratório - Área: Automação |
Q2226755
Mecatrônica
Quanto às características de utilização de módulos analógicos de um CLP, analise as
assertivas abaixo:
I. Os módulos são específicos para cada tipo de sensor que for usado, não podendo medir temperatura com o modulo analógico utilizado para medir fluxo.
II. Com o módulo analógico, é possível capturar, processar e controlar sinais analógicos.
III. Com um modulo analógico, pode-se comunicar dispositivos como computadores.
IV. As variáveis analógicas caracterizam a representação contínua de uma grandeza física.
Quais estão corretas?
I. Os módulos são específicos para cada tipo de sensor que for usado, não podendo medir temperatura com o modulo analógico utilizado para medir fluxo.
II. Com o módulo analógico, é possível capturar, processar e controlar sinais analógicos.
III. Com um modulo analógico, pode-se comunicar dispositivos como computadores.
IV. As variáveis analógicas caracterizam a representação contínua de uma grandeza física.
Quais estão corretas?
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Técnico de Laboratório - Área: Automação |
Q2226753
Mecatrônica
As indústrias utilizam o CLP para controle de seus processos. Sobre esse tema, qual
das alternativas melhor apresenta os componentes principais de um CLP?
Q2166820
Mecatrônica
As saídas digitais de controladores lógicos programáveis (CLPs) são utilizadas para acionar
diversos tipos de atuadores discretos, como válvulas solenoides, motores e lâmpadas. Existem
basicamente três classes: saídas a relé, saídas a transistor e saídas a tiristor. Indique se as
afirmativas a seguir, a respeito de saídas digitais de CLPs, são verdadeiras (V) ou falsas (F) e
assinale a alternativa com a sequência correta de cima para baixo.
( ) As saídas a relé podem atuar em uma ampla faixa de tensão e corrente, o que reduz a necessidade de circuitos auxiliares.
( ) As saídas a transistor são especificadas para comutar tanto circuitos em corrente contínua quanto em corrente alternada.
( ) Por serem baseadas em elementos estáticos, as saídas a transistor possuem maior velocidade de comutação que as saídas a relé.
( ) Por serem baseadas em elementos eletromecânicos, as saídas a tiristor possuem menor vida útil que as saídas a relé.
( ) As saídas a relé podem atuar em uma ampla faixa de tensão e corrente, o que reduz a necessidade de circuitos auxiliares.
( ) As saídas a transistor são especificadas para comutar tanto circuitos em corrente contínua quanto em corrente alternada.
( ) Por serem baseadas em elementos estáticos, as saídas a transistor possuem maior velocidade de comutação que as saídas a relé.
( ) Por serem baseadas em elementos eletromecânicos, as saídas a tiristor possuem menor vida útil que as saídas a relé.
Ano: 2021
Banca:
FGV
Órgão:
IMBEL
Prova:
FGV - 2021 - IMBEL - Engenheiro Mecatrônico - Reaplicação |
Q1847207
Mecatrônica
Assinale a opção que indica o conceito mais completo para
descrever a essência da execução do movimento de um
manipulador robótico no contexto de uma tarefa.
Ano: 2021
Banca:
FGV
Órgão:
IMBEL
Prova:
FGV - 2021 - IMBEL - Engenheiro Mecatrônico - Reaplicação |
Q1847203
Mecatrônica
No programa LADDER da figura, X1, Y1 e C1 são variáveis
booleanas na memória de um CLP e TON é um temporizador com
atraso no acionamento, e com tempo de atraso indicado na
figura e especificado em segundos. Sabe-se que todas as variáveis
booleanas estão inicialmente em nível lógico 0, que a contagem
do temporizador está inicialmente zerada, e que a variável X1
evolui de 0 a 15s conforme a figura.
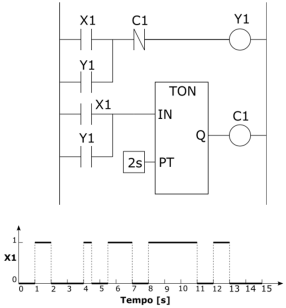
Desprezando-se o tempo de varredura do CLP, o tempo, em segundos, em que Y1 permanece em nível lógico 1 no intervalo de 0 a 15s é
Desprezando-se o tempo de varredura do CLP, o tempo, em segundos, em que Y1 permanece em nível lógico 1 no intervalo de 0 a 15s é
Ano: 2019
Banca:
VUNESP
Órgão:
UFABC
Prova:
VUNESP - 2019 - UFABC - Técnico de Laboratório - Mecatrônica |
Q1058880
Mecatrônica
Um robô industrial foi implantado em uma célula de manufatura com a função de inspecionar as dimensões de peças plásticas. A medição das dimensões das peças é realizada por meio de um sensor instalado no efetuador final do robô, sem que seja necessário o contato físico com a peça.
De acordo com essas informações, o dispositivo que foi instalado no efetuador final do robô é um sensor do tipo