Questões de Concurso Público Petrobras 2011 para Engenheiro de Equipamento Júnior - Eletrônica
Foram encontradas 32 questões
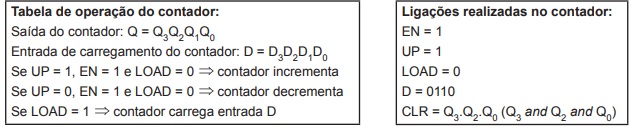
Considere um contador binário de 4 bits, cujas tabelas de operação e de ligações estão mostradas acima. O contador dispõe dos sinais LOAD (carregamento paralelo sincronizado pelo clock), CLR (clear síncrono) e EN (habilitador de contagem a cada clock), todos ativados em nível alto, além do sinal UP, que define a direção de contagem. Sabendo-se que a habilitação de LOAD tem prioridade sobre a habilitação de contagem, o número de estados da sequência permanente implementada é
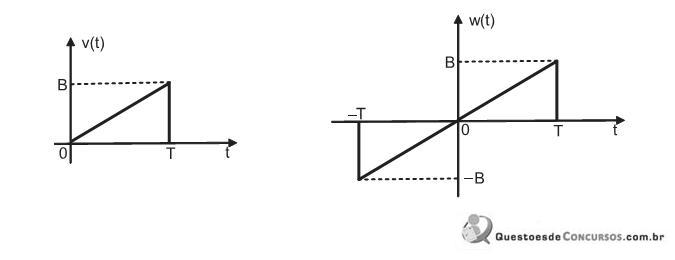
A figura acima mostra dois sinais, na forma de pulsos limitados no tempo. Considere que a transformada de Fourier de v(t) é dada pela expressão, na forma polar,
 . Com base nas propriedades da transformada de Fourier e considerando as semelhanças e simetrias entre os dois pulsos, a expressão da transformada de w(t) é
. Com base nas propriedades da transformada de Fourier e considerando as semelhanças e simetrias entre os dois pulsos, a expressão da transformada de w(t) é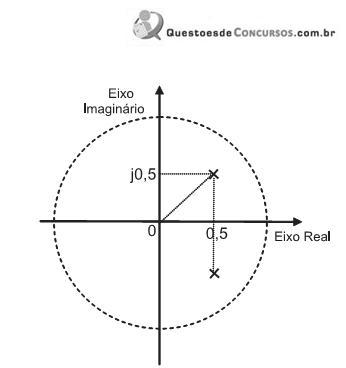
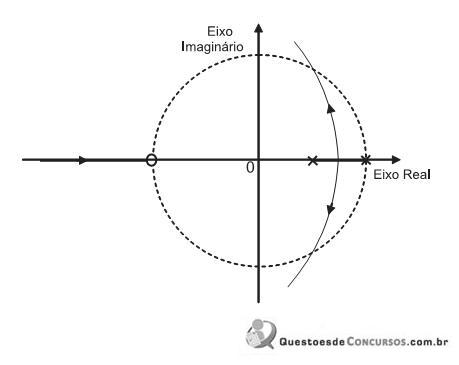
Um sistema discreto de 2ª ordem é composto por dois polos complexos, conjugados, que estão representados no diagrama de polos e zeros da figura acima. O círculo unitário está traçado com linha pontilhada. A resposta ao impulso desse sistema gera um sinal, discreto, senoidal amortecido e que oscila na frequência de 25π rad/s. Nessas condições, o período de amostragem, em ms, usado na discretização desse sistema, é
O modelo discreto de um sistema, em malha aberta, é representado pela função de transferência G(z) = K(z +1) / z2 -1,5z + 0,5. A figura acima mostra o esboço do lugar das raízes, no plano Z, para esse sistema, em malha fechada, com realimentação de saída e com o ganho variando no intervalo 0 ≤ k < + ∞ . O circulo unitário está traçado com linha pontilhada. O valor do ganho K, para que o sistema em malha fechada esteja no limiar da instabilidade, é
 , onde
, onde •ζ = cos (Φ) é a razão de amortecimento; e
• ωn é a frequência natural não amortecida.
Para discretizar esse sistema e aplicar um controle digital, o período de amostragem deve ser tal que ocorram 10 amostras durante o tempo de subida. O valor aproximado desse período é
Considere as informações a seguir para responder à questão.
O controle de atitude de um satélite em órbita consiste em ajustar, automaticamente, o ângulo de seu eixo, de modo a direcionar sua antena para a região desejada na superfície da Terra. O modelo simplificado desse sistema consta de um sinal de entrada, que é o torque τ(t), e de um sinal de saída, que é o ângulo θ(t). Considerando o vetor de estado X(t)=  definido com x1(t) =
definido com x1(t) =  (t) , posição angular e x2(t) = (t) = dθ / dt , a velocidade angular, obtém-se o seguinte modelo em espaço de estado.
(t) , posição angular e x2(t) = (t) = dθ / dt , a velocidade angular, obtém-se o seguinte modelo em espaço de estado.
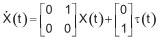 e y(t) = [1,0] x(t)
e y(t) = [1,0] x(t)
Aplicando uma realimentação de estado, com a lei de controle dada por τ(t)= - KX(t)= -[k1 k2] X(t), o valor do vetor de ganhos K, que conduz os polos em malha fechada para as posições -2 e -3, é
Considere as informações a seguir para responder à questão.
O controle de atitude de um satélite em órbita consiste em ajustar, automaticamente, o ângulo de seu eixo, de modo a direcionar sua antena para a região desejada na superfície da Terra. O modelo simplificado desse sistema consta de um sinal de entrada, que é o torque τ(t), e de um sinal de saída, que é o ângulo θ(t). Considerando o vetor de estado X(t)= definido com x1(t) = (t) , posição angular e x2(t) = (t) = dθ / dt , a velocidade angular, obtém-se o seguinte modelo em espaço de estado.
e y(t) = [1,0] x(t)
Discretizando este modelo, pelo método ZOH, com o período de amostragem T, obtém-se o modelo discreto dado por:
X(k + 1)= ΦX(k) + Γτ(k) e y(k) = CX(k)
A matriz Φ é
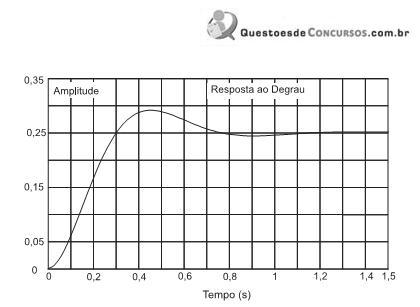
O gráfico da figura acima corresponde à resposta ao degrau unitário aplicado na entrada de um sistema de 2ª ordem, cuja função de transferência é G(s) = 16 /s2 + 8s + b. Com base nos dados da figura, os polos desse sistema são complexos, conjugados e iguais a
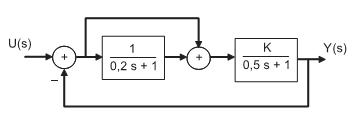
O diagrama em blocos da figura acima mostra um sistema em malha fechada, onde U(s) é o sinal de entrada e Y(s), o sinal de saída. O valor do ganho K, para que os polos da função de transferência sejam Y(s) /U(s) complexos, conjugados e com parte real igual -6,5, é
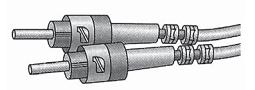
Ele utiliza um sistema de travamento de baioneta, mais confiável que o sistema conhecido como empurra/puxa. Esse conector é conhecido pela sigla
Dispondo-se de um canal com largura de banda de 25 MHz, o método de modulação que atende à condição para que a IES seja desprezível é o
G(s) = 9 /s2 + 6s + 9
A partir da análise de estabilidade e de desempenho, afirma-se que G(s) é
I - O sistema supervisório é um sistema que recebe informações de diversos instrumentos, com possibilidade de monitorar, controlar, manter e operar uma planta industrial, incorporando funções de controle supervisório.
II - Transmissor é um instrumento que recebe um sinal em um padrão industrial de grandeza física e o converte em um sinal de outra grandeza, proporcionalmente.
III - Histerese é a diferença máxima apresentada por um instrumento, para um mesmo valor, em qual- quer ponto da faixa de trabalho, quando a variável percorre toda a escala no sentido ascendente e descendente.
Está correto, de acordo com a terminologia técnica, APENAS o que se afirma em
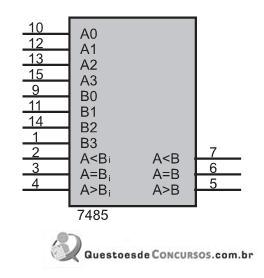
Deseja-se comparar o número P3P2P1P0(com sinal – representado de –8 a +7) com o número Q3Q2Q1Q0(sem sinal – representado de 0 a 15), usando-se um comparador sem sinal tipo 7485. Para isso, basta zerar A > Bi e A < Bi, ativar A = Bi e tomar as saídas do comparador, desde que as entradas A3A2A1A0 e B3B2B1B0 sejam, respectivamente
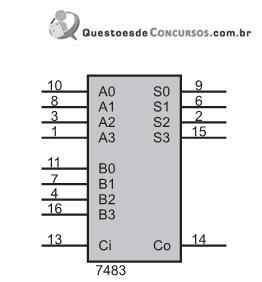
Deseja-se projetar um circuito, usando-se apenas um somador de 4 bits tipo 7483, que converta um número D4D3D2D1D0 , em representação BCD de 5 bits (0 a 19), para um número B4B3B2B1B0 em representação binária de 5 bits. Para isso, basta zerar Ci e tomar as saídas do somador, desde que as entradas A3A2A1A0 e B3B2B1B0 sejam, respectivamente,
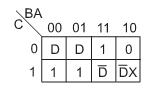
Desconsiderando-se os inversores, a menor soma de produtos que implementa o mapa acima possui
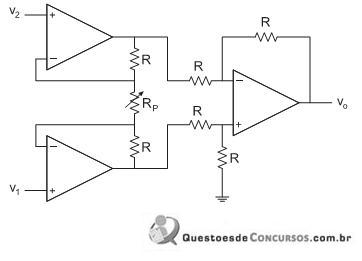
A figura acima mostra um circuito amplificador que fornece uma saída Vo , baseada na diferença entre duas entradas (V1 - V2). O valor da resistência do potenciômetro Rp , em função de R, para que se tenha Vo = 3(V1 -V2) , é