Questões de Concurso Público Transpetro 2012 para Engenheiro Júnior - Automação
Foram encontradas 70 questões
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262937
Engenharia Eletrônica
Um sistema dinâmico foi modelado segundo a equação diferencial a seguir, na qual a função forçante é a tensão u(t) e a variável independente é a intensidade de corrente i(t).
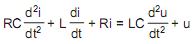
A função de transferência do sistema elétrico é
A função de transferência do sistema elétrico é
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262938
Mecânica
O planejamento de sistemas de automação para uma empresa envolve, comumente, a escolha de suportes de transmissão de dados entre as redes. Em muitas situações, a solução desse problema ocorre pela utilização de guias físicos que asseguram a manutenção de uma conexão direta e permanente, como a que se obtém com o aproveitamento da rede telefônica.
A utilização de tais guias físicos
A utilização de tais guias físicos
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262939
Física
A modelagem matemática de sistemas físicos geralmente não é uma tarefa fácil.
Um dos desafios que o engenheiro enfrenta para atingir esse objetivo é
Um dos desafios que o engenheiro enfrenta para atingir esse objetivo é
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262940
Engenharia de Automação
Atualmente, muitos sistemas têm sido desenvolvidos na parte física do processo de automação industrial, destacando-se a transmissão de informação para controle das operações. As redes fazem a comunicação entre diferentes setores com o objetivo de trocar informações.
As chamadas redes de chão de fábrica
As chamadas redes de chão de fábrica
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262941
Engenharia de Automação
A maioria das empresas procura, atualmente, otimizar a conectividade de suas redes através da automação baseada em soluções da tecnologia da informação. Já é comum a interligação de controladores e de outros dispositivos com tendência aos barramentos de campo, que serão gradualmente integrados a outros sistemas de automação.
Tendo em vista a necessidade crescente de segurança no sistema de automação, os usuários podem assumir alguns cuidados, como
Tendo em vista a necessidade crescente de segurança no sistema de automação, os usuários podem assumir alguns cuidados, como
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262942
Engenharia Eletrônica
O Controlador Lógico Programável (CLP) é definido como dispositivo capaz de armazenar instruções destinadas a sistemas automatizados.
É uma característica do CLP
É uma característica do CLP
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262943
Física
Um sistema de controle opera com um sensor eletromagnético não linear que converte uma intensidade de corrente i em força F. A função não linear que converte corrente (A) em força (N) é dada por F(i) = 4i 3 - 6i 2 + 2i. Precisando linearizar essa função no ponto nominal de corrente i=1, obtém-se para esse ponto de operação a função linear FL(i) = A + Bi.
Os valores de A e B, respectivamente, são
Os valores de A e B, respectivamente, são
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262944
Engenharia de Automação
Um sistema dinâmico, utilizado para controle de uma rede automatizada, forneceu dados processados ao longo do tempo e que permitiram a construção do quadro abaixo.
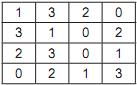
A partir dos dados assinalados, mantendo-se a mesma disposição, construiu-se uma matriz M.
O valor do determinante associado à matriz M é
A partir dos dados assinalados, mantendo-se a mesma disposição, construiu-se uma matriz M.
O valor do determinante associado à matriz M é
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262945
Física
O projeto de um sistema de controle envolve um sinal eletromagnético que se propaga, em função do tempo, de acordo com a equação diferencial linear  sendo
sendo 
A solução dessa equação, válida unicamente para é expressa por
é expressa por
sendo A solução dessa equação, válida unicamente para
é expressa por
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262946
Engenharia Eletrônica
O filtro passa-baixas é o nome comum dado a um circuito eletrônico que permite a passagem de baixas frequências e atenua a amplitude das frequências maiores do que a frequência de corte. Ele consiste em um circuito eletrônico simples dotado de um resistor em série e em um capacitor paralelo com a carga. A frequência de corte é determinada pela escolha da resistência e da capacitância.
Admitindo uma resistência uma capacitância
uma capacitância  o valor da frequência de corte, em hertz, é
o valor da frequência de corte, em hertz, é
Admitindo uma resistência
uma capacitância o valor da frequência de corte, em hertz, é
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262947
Engenharia Eletrônica
Um circuito elétrico tem uma função de transferência dada por G(s) = 
Para que o sistema seja estável, é necessário e suficiente que
Para que o sistema seja estável, é necessário e suficiente que
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262948
Engenharia Elétrica
Um sistema de controle utiliza um capacitor de capacitância 1,0 µF, inicialmente neutro. Ele é ligado a uma fonte de tensão constante até carregar-se completamente. A seguir, verifica-se que, descarregando-o através de um resistor, o calor desenvolvido equivale a 0,125 J.
Nessa situação, o valor da tensão, em volts, à qual sub- mete-se o capacitor é
Nessa situação, o valor da tensão, em volts, à qual sub- mete-se o capacitor é
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262949
Engenharia de Automação
A análise de sistemas de controle de automação envolve conhecimentos sobre o funcionamento de seus componentes eletrônicos. A esse respeito são feitas as afirmativas:
I – Ao se aplicar um pulso positivo à porta (gate) de um SCR, este continua conduzindo, mesmo que o sinal de disparo seja retirado, e assim permanece enquanto houver uma corrente mínima circulando entre anodo e catodo, chamada corrente de manutenção.
II – O IGBT é um componente eletrônico cujo controle de condução entre o coletor e o emissor é feito por tensão ao invés de corrente.
III – Um TRIAC é um elemento bidirecional, ou seja, pode conduzir nos dois semiciclos de uma senoide.
Está correto o que se afirma em
I – Ao se aplicar um pulso positivo à porta (gate) de um SCR, este continua conduzindo, mesmo que o sinal de disparo seja retirado, e assim permanece enquanto houver uma corrente mínima circulando entre anodo e catodo, chamada corrente de manutenção.
II – O IGBT é um componente eletrônico cujo controle de condução entre o coletor e o emissor é feito por tensão ao invés de corrente.
III – Um TRIAC é um elemento bidirecional, ou seja, pode conduzir nos dois semiciclos de uma senoide.
Está correto o que se afirma em
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262950
Engenharia Eletrônica
O controlador frequentemente utilizado em sistemas de controle em malha fechada é o
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262951
Engenharia de Automação
Considere as afirmativas abaixo que se referem às dificuldades que o uso de ondas de rádio em alta frequência, como alternativa aos cabos coaxiais ou fibras óticas, apresentam no processo de transmissão de dados entre redes de computadores conectados aos sistemas de automação.
I – O uso de ondas de rádio em alta frequência depende de regulamentação junto aos órgãos públicos.
II – O uso de ondas de rádio em alta frequência gera problemas de autenticação junto aos usuários.
III – O uso de ondas de rádio em alta frequência está sujeito à ocorrência de interferência entre os componentes do sistema.
IV – O uso de ondas de rádio em alta frequência impossibilita a existência de unidades transceptoras móveis.
Está correto APENAS o que se afirma em
I – O uso de ondas de rádio em alta frequência depende de regulamentação junto aos órgãos públicos.
II – O uso de ondas de rádio em alta frequência gera problemas de autenticação junto aos usuários.
III – O uso de ondas de rádio em alta frequência está sujeito à ocorrência de interferência entre os componentes do sistema.
IV – O uso de ondas de rádio em alta frequência impossibilita a existência de unidades transceptoras móveis.
Está correto APENAS o que se afirma em
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262952
Engenharia de Automação
Um projeto de automação utiliza um sistema hidráulico que opera com resfriamento de água. A água circula através de uma bomba que a retira de um poço, à razão de 7,5 litros por segundo. O engenheiro identificou que o poço possui 10 metros de profundidade e que o rendimento da bomba é de 80%.
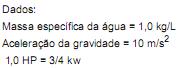
A potência mecânica, em HP, necessária e suficiente ao sistema hidráulico, atendendo às condições dadas, é
A potência mecânica, em HP, necessária e suficiente ao sistema hidráulico, atendendo às condições dadas, é
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262953
Engenharia Mecânica
A necessidade de utilizar Controladores Lógicos Programáveis (CLP) em linguagem Ladder para controle e operação de sistemas automatizados prevê a utilização de elemento temporizador.
A esse respeito, observe as afirmativas a seguir.
I – O temporizador deve ser do tipo não retentivo, isto é, se a energização for perdida, o valor acumulado é zerado.
II – O temporizador deve possuir uma entrada que, ao se energizar, habilita o acúmulo do tempo decorrido.
III – O temporizador deve possuir uma saída que será energizada quando o valor acumulado for igual ao preestabelecido, e todas as outras condições de funcionamento do elemento estiverem satisfeitas.
Está correto o que se afirma em
A esse respeito, observe as afirmativas a seguir.
I – O temporizador deve ser do tipo não retentivo, isto é, se a energização for perdida, o valor acumulado é zerado.
II – O temporizador deve possuir uma entrada que, ao se energizar, habilita o acúmulo do tempo decorrido.
III – O temporizador deve possuir uma saída que será energizada quando o valor acumulado for igual ao preestabelecido, e todas as outras condições de funcionamento do elemento estiverem satisfeitas.
Está correto o que se afirma em
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262954
Engenharia Elétrica
A topologia física de rede com fibras óticas mais adequada para prever a redundância de rotas de comunicação entre dois pontos de comunicação nos sistemas elétricos é a
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262955
Mecânica
A rede PROFIBUS é uma das redes mais utilizadas em ambientes industriais.
Observe as afirmações a seguir referentes à rede PROFIBUS.
I – A rede PROFIBUS é baseada em padrões reconhecidos internacionalmente, sendo sua arquitetura de protocolo orientada ao modelo de referência OSI (Open System Interconnection), conforme o padrão internacional ISO 7498.
II – A rede PROFIBUS-DP permite sistemas mono e multimestre oferecendo um alto grau de flexibilidade na configuração do sistema, com até 256 dispositivos (mestres ou escravos) podendo ser ligados a um barramento, e sua configuração consiste na definição do número de estações, dos endereços das estações e de seus I/O, do formato dos dados de I/O, do formato das mensagens de diagnósticos e os parâmetros de barramento.
III – Cada sistema de PROFIBUS-DP pode conter três tipos de dispositivos diferentes: (a) Classe-1 DP MASTER é um controlador central que troca informação com as estações descentralizadas dentro de um ciclo de mensagem especificado; (b) Classe-2 DP MASTER são terminais, dispositivos ou painéis de operação utilizados para configuração do sistema DP e também para a manutenção e diagnóstico do barramento ou de seus dispositivos; (c) DP SLAVE é um dispositivo periférico que coleta informações de entrada e envia informações de saída ao controlador.
Está correto o que se afirma em
Observe as afirmações a seguir referentes à rede PROFIBUS.
I – A rede PROFIBUS é baseada em padrões reconhecidos internacionalmente, sendo sua arquitetura de protocolo orientada ao modelo de referência OSI (Open System Interconnection), conforme o padrão internacional ISO 7498.
II – A rede PROFIBUS-DP permite sistemas mono e multimestre oferecendo um alto grau de flexibilidade na configuração do sistema, com até 256 dispositivos (mestres ou escravos) podendo ser ligados a um barramento, e sua configuração consiste na definição do número de estações, dos endereços das estações e de seus I/O, do formato dos dados de I/O, do formato das mensagens de diagnósticos e os parâmetros de barramento.
III – Cada sistema de PROFIBUS-DP pode conter três tipos de dispositivos diferentes: (a) Classe-1 DP MASTER é um controlador central que troca informação com as estações descentralizadas dentro de um ciclo de mensagem especificado; (b) Classe-2 DP MASTER são terminais, dispositivos ou painéis de operação utilizados para configuração do sistema DP e também para a manutenção e diagnóstico do barramento ou de seus dispositivos; (c) DP SLAVE é um dispositivo periférico que coleta informações de entrada e envia informações de saída ao controlador.
Está correto o que se afirma em
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262956
Engenharia Eletrônica
Sistemas controladores pneumáticos e hidráulicos têm larga aplicação na automação industrial. Considere as afirmativas a seguir, que comparam os dois tipos de sistemas controladores.
I – O ar não tem propriedades lubrificantes e sempre contém vapor d’agua, enquanto que o óleo é lubrificante e permite transferir calor gerado no sistema para um trocador de calor conveniente.
II – As potências de saída dos sistemas pneumáticos são consideravelmente superiores às dos sistemas hidráulicos.
III – A precisão dos atuadores pneumáticos é deficiente nas baixas velocidades, enquanto que a precisão dos atuadores hidráulicos é satisfatória em todas as velocidades.
Está correto o que se afirma em
I – O ar não tem propriedades lubrificantes e sempre contém vapor d’agua, enquanto que o óleo é lubrificante e permite transferir calor gerado no sistema para um trocador de calor conveniente.
II – As potências de saída dos sistemas pneumáticos são consideravelmente superiores às dos sistemas hidráulicos.
III – A precisão dos atuadores pneumáticos é deficiente nas baixas velocidades, enquanto que a precisão dos atuadores hidráulicos é satisfatória em todas as velocidades.
Está correto o que se afirma em