Questões de Concurso Público IBGE 2013 para Tecnologista - Cartografia
Foram encontradas 70 questões
O ajustamento da Rede Altimétrica de Alta Precisão (RAAP) brasileira utilizou o método de divisão por blocos de Helmert, uma alternativa muito utilizada para o ajuste de redes geodésicas, principalmente em redes de dimensões continentais como a brasileira. Em uma das etapas do processo, foram fixadas duas estações para proceder ao ajustamento simultâneo da rede, o datum Imbituba, em Santa Catarina, e o datum Santana, no Amapá.
A fixação dessas duas estações altimétricas deve-se:
Observe o relatório da estação 8112905, localizada no Rio de Janeiro, obtido no sítio do IBGE:
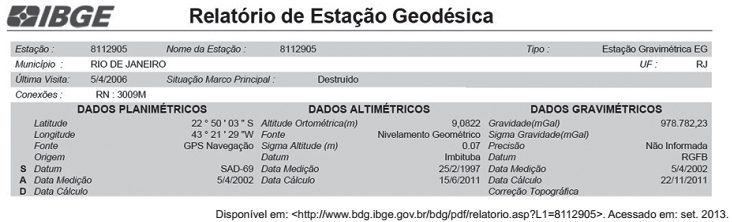
Considere que a redução de ar livre é dada pela expressão F = +0,3086H, e que o platô de Bouguer é AB = 0,1119H, e, para fins de cálculo, considere, também, que a altitude ortométrica é igual a 9,0 m.
Nessas condições, pelo processo de redução de Bouguer simplificada, a gravidade de Bouguer na Estação Gravimétrica
destruída vale, aproximadamente, em mGal,
Em Geodesia Geométrica, o elipsoide de revolução é a figura geométrica utilizada nos cálculos sobre a superfície.Os parâmetros geométricos de um elipsoide qualquer são sua 1ª excentricidade, e, seu semieixo maior, a, e seu semieixomenor, b. A relação entre essas grandezas é dada por e2 = a2 - b2/a2 , e os raios de curvaturas do meridiano (M) e doprimeiro vertical (N) são dados, respectivamente, pelas fórmulas:

onde φ representa a latitude no ponto.
O local em que os dois raios de curvatura serão iguais, e o valor desses raios, quando se estabelece a igualdade, são,respectivamente,
Dentre as escalas de tempo que são importantes para o Sistema de Posicionamento Global (GPS), inclui-se o Tempo Universal Coordenado (UTC).
O UTC, a despeito de uma diferença de um número inteiro de segundos, concorda com o sistema de
No método de levantamento geodésico conhecido como cinemático, não pode haver perda de sinal sem a possibilidade de recuperá-lo. Assim, este método inclui a capacidade de recobrir os ciclos perdidos e resolver as ambiguidades em tempo real.
Uma maneira de recuperar uma perda de ciclos no método cinemático é:
A superfície geoidal é uma superfície equipotencial do campo gravitacional da Terra que melhor se aproxima do nível não perturbado dos mares prolongado por sob os continentes. A distância entre a superfície geoidal e o elipsoide de referência é a ondulação geoidal, cuja determinação está ligada ao Problema do Valor de Contorno da Geodesia. Em 1945, Molodenski propôs um modelo para solução desse problema cujo princípio geométrico é mostrado na Figura a seguir.
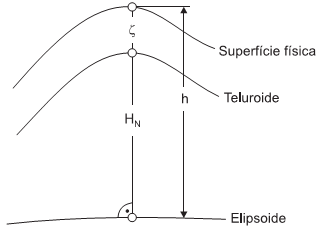
Nesse modelo, as variáveis que determinam a altitude
elipsoidal são:
A qualidade do resultado do posicionamento com receptores de uma frequência é afetada, principalmente, pela influência da ionosfera nos sinais GPS, que passou a ser a principal fonte de erro na navegação e no posicionamento com GPS, após a desativação da Disponibilidade Seletiva (SA).
Como o erro sistemático devido ao efeito da ionosfera é inversamente proporcional ao quadrado da frequência, uma forma de minimizá-lo é
Uma superfície apresenta o potencial normal U de um ponto qualquer Q igual ao potencial gravífico W do seu correspondente ponto P da superfície topográfica.
Tal superfície é conhecida como
O filtro de Kalman é um método recursivo que tem sido utilizado em certas aplicações, tais como o posicionamento cinemático por GPS e a navegação por sistema inercial. A modelagem funcional básica desse método é composta por duas equações matriciais, a das observações e a do modelo dinâmico:
Lb = A . X + V
X2 = T1/2 . X1 + W
Onde:
Lb é o vetor das observações;
A é a matriz dos coeficientes;
X é o vetor das variáveis aleatórias;
X1 é o vetor das variáveis aleatórias em um tempo t1 ;
X2 é o vetor das variáveis aleatórias em um tempo t2 ;
T1/2 é a matriz de transição do tempo t1 para o tempo t2 ;
V é o vetor de ruídos na equação das observações e
W é o vetor de ruídos na equação do modelo dinâmico.
Considerando que E(x), denota a esperança matemática de uma variável x, e Cov(x), a covariância de uma variável x, a afirmação:
Para que se possa aplicar o filtro de Kalman, uma das injunções iniciais é que haja independência estatística entre os ruídos da equação das observações e o modelo dinâmico.
significa que