Questões de Concurso Público Telebras 2022 para Especialista em Gestão de Telecomunicações – Engenheiro Aeroespacial
Foram encontradas 70 questões
21
Ano: 2022
Banca:
CESPE / CEBRASPE
Órgão:
Telebras
Prova:
CESPE / CEBRASPE - 2022 - Telebras - Especialista em Gestão de Telecomunicações – Engenheiro Aeroespacial |
Q1884089
Não definido
Julgue o item subsecutivo, a respeito de dinâmica orbital e mecânica celeste.
A transferência orbital do satélite entre órbitas circulares com raios r1 e r2 (r2 > r1) é conhecida como manobra Hohmann de transferência de órbita; o incremento de velocidade para tal manobra será a diferença dos incrementos de velocidade no perigeu e no epogeu.
A transferência orbital do satélite entre órbitas circulares com raios r1 e r2 (r2 > r1) é conhecida como manobra Hohmann de transferência de órbita; o incremento de velocidade para tal manobra será a diferença dos incrementos de velocidade no perigeu e no epogeu.
22
Ano: 2022
Banca:
CESPE / CEBRASPE
Órgão:
Telebras
Prova:
CESPE / CEBRASPE - 2022 - Telebras - Especialista em Gestão de Telecomunicações – Engenheiro Aeroespacial |
Q1884090
Não definido
Julgue o item subsecutivo, a respeito de dinâmica orbital e mecânica celeste.
Nos sistemas de coordenadas celestes horizontal e equatorial, o azimute coincide com a ascensão reta.
Nos sistemas de coordenadas celestes horizontal e equatorial, o azimute coincide com a ascensão reta.
23
Ano: 2022
Banca:
CESPE / CEBRASPE
Órgão:
Telebras
Prova:
CESPE / CEBRASPE - 2022 - Telebras - Especialista em Gestão de Telecomunicações – Engenheiro Aeroespacial |
Q1884091
Não definido
Julgue o item subsecutivo, em relação ao encontro de naves
espaciais no espaço, um tema importante para os sistemas
espaciais.
Para executar o encontro de duas naves espaciais em órbita da Terra, é preciso calcular os incrementos de velocidade orbital necessários; se a excentricidade da órbita for desprezada, o incremento nas velocidades dependerá apenas da constante de Kepler, K.
Para executar o encontro de duas naves espaciais em órbita da Terra, é preciso calcular os incrementos de velocidade orbital necessários; se a excentricidade da órbita for desprezada, o incremento nas velocidades dependerá apenas da constante de Kepler, K.
24
Ano: 2022
Banca:
CESPE / CEBRASPE
Órgão:
Telebras
Prova:
CESPE / CEBRASPE - 2022 - Telebras - Especialista em Gestão de Telecomunicações – Engenheiro Aeroespacial |
Q1884092
Não definido
Julgue o item que se segue, relativos à dinâmica de voo de
veículos espaciais.
Para um ponto p que se move ao longo de uma órbita determinada pelo vetor posição r(x, y, z) e um ângulo da órbita oth, o vetor aceleração a, com componentes transversal e radial, será corretamente escrito como a seguir.

Para um ponto p que se move ao longo de uma órbita determinada pelo vetor posição r(x, y, z) e um ângulo da órbita oth, o vetor aceleração a, com componentes transversal e radial, será corretamente escrito como a seguir.
25
Ano: 2022
Banca:
CESPE / CEBRASPE
Órgão:
Telebras
Prova:
CESPE / CEBRASPE - 2022 - Telebras - Especialista em Gestão de Telecomunicações – Engenheiro Aeroespacial |
Q1884093
Não definido
Julgue o item que se segue, relativos à dinâmica de voo de veículos espaciais.
Para o caso geral do movimento de um corpo rígido, como, por exemplo, um veículo espacial, no espaço, a aceleração será dada pela expressão a seguir, em que ω é a velocidade angular e em que são utilizadas as coordenadas do ponto p(x, y, z), bem como as coordenadas do sistema inercial (X, Y, Z); nessa análise, as acelerações devido à força de Coriolis são desconsideradas.

Para o caso geral do movimento de um corpo rígido, como, por exemplo, um veículo espacial, no espaço, a aceleração será dada pela expressão a seguir, em que ω é a velocidade angular e em que são utilizadas as coordenadas do ponto p(x, y, z), bem como as coordenadas do sistema inercial (X, Y, Z); nessa análise, as acelerações devido à força de Coriolis são desconsideradas.
26
Ano: 2022
Banca:
CESPE / CEBRASPE
Órgão:
Telebras
Prova:
CESPE / CEBRASPE - 2022 - Telebras - Especialista em Gestão de Telecomunicações – Engenheiro Aeroespacial |
Q1884094
Não definido
Julgue o item que se segue, relativos à dinâmica de voo de veículos espaciais.
Na determinação dos parâmetros orbitais de veículos espaciais, para analisar o movimento de rotação do veículo em relação a Terra, adota-se um sistema de coordenadas inercial R(X, Y, Z); nesse caso, a aceleração av do veículo em relação ao sistema inercial, será escrita como a seguir, em que W é o vetor velocidade de rotação da Terra e ar = (g – 2 W × vr).

Na determinação dos parâmetros orbitais de veículos espaciais, para analisar o movimento de rotação do veículo em relação a Terra, adota-se um sistema de coordenadas inercial R(X, Y, Z); nesse caso, a aceleração av do veículo em relação ao sistema inercial, será escrita como a seguir, em que W é o vetor velocidade de rotação da Terra e ar = (g – 2 W × vr).
27
Ano: 2022
Banca:
CESPE / CEBRASPE
Órgão:
Telebras
Prova:
CESPE / CEBRASPE - 2022 - Telebras - Especialista em Gestão de Telecomunicações – Engenheiro Aeroespacial |
Q1884095
Não definido
Julgue o item que se segue, relativos à dinâmica de voo de veículos espaciais.
A dinâmica da atitude de um veículo espacial é baseada primariamente nas equações da dinâmica orbital de corpos rígidos. Os movimentos, posições e atitudes podem ser representados por sistemas de coordenadas fixadas no eixo do veículo e(ou) em sistemas de coordenadas inerciais; a partir deles é possível prever e avaliar acelerações e rotações do veículo.
A dinâmica da atitude de um veículo espacial é baseada primariamente nas equações da dinâmica orbital de corpos rígidos. Os movimentos, posições e atitudes podem ser representados por sistemas de coordenadas fixadas no eixo do veículo e(ou) em sistemas de coordenadas inerciais; a partir deles é possível prever e avaliar acelerações e rotações do veículo.
28
Ano: 2022
Banca:
CESPE / CEBRASPE
Órgão:
Telebras
Prova:
CESPE / CEBRASPE - 2022 - Telebras - Especialista em Gestão de Telecomunicações – Engenheiro Aeroespacial |
Q1884096
Não definido
Julgue o item que se segue, relativos à dinâmica de voo de veículos espaciais.
Os ângulos de Euler formam três quantidades independentes capazes de definir a posição do eixo do corpo em termos de (x, y, z), em relação a um sistema de coordenadas inercial. A matriz de transferência ou transformação, que representa a rotação do corpo em torno do eixo-z, e a matriz de rotação em termos das velocidades angulares e dos ângulos de Euler são equivalentes.
Os ângulos de Euler formam três quantidades independentes capazes de definir a posição do eixo do corpo em termos de (x, y, z), em relação a um sistema de coordenadas inercial. A matriz de transferência ou transformação, que representa a rotação do corpo em torno do eixo-z, e a matriz de rotação em termos das velocidades angulares e dos ângulos de Euler são equivalentes.
29
Ano: 2022
Banca:
CESPE / CEBRASPE
Órgão:
Telebras
Prova:
CESPE / CEBRASPE - 2022 - Telebras - Especialista em Gestão de Telecomunicações – Engenheiro Aeroespacial |
Q1884097
Não definido
A respeito de sistemas de controle de atitude utilizados em
satélites, julgue o item seguinte.
O fibre optic gyroscope (FOG) é um giroscópio utilizado em satélite mais leve que o RLG, pois o bloco contendo os prismas é eliminado.
O fibre optic gyroscope (FOG) é um giroscópio utilizado em satélite mais leve que o RLG, pois o bloco contendo os prismas é eliminado.
30
Ano: 2022
Banca:
CESPE / CEBRASPE
Órgão:
Telebras
Prova:
CESPE / CEBRASPE - 2022 - Telebras - Especialista em Gestão de Telecomunicações – Engenheiro Aeroespacial |
Q1884098
Não definido
A respeito de sistemas de controle de atitude utilizados em satélites, julgue o item seguinte.
O controle de atitude de satélites é realizado via atuador, após comando do ângulo de referência escolhido, rotina de controle de torque e sensor de dinâmica da atitude do veículo espacial.
O controle de atitude de satélites é realizado via atuador, após comando do ângulo de referência escolhido, rotina de controle de torque e sensor de dinâmica da atitude do veículo espacial.
31
Ano: 2022
Banca:
CESPE / CEBRASPE
Órgão:
Telebras
Prova:
CESPE / CEBRASPE - 2022 - Telebras - Especialista em Gestão de Telecomunicações – Engenheiro Aeroespacial |
Q1884099
Não definido
A respeito de sistemas de controle de atitude utilizados em satélites, julgue o item seguinte.
Na ausência de forças externas, as equações de Euler para um corpo rígido mostram que a rotação do corpo em torno de qualquer um dos seus eixos principais é possível. A questão a resolvida no projeto do satélite será relativa à escolha do melhor eixo para a realização da estabilização por spin.
Na ausência de forças externas, as equações de Euler para um corpo rígido mostram que a rotação do corpo em torno de qualquer um dos seus eixos principais é possível. A questão a resolvida no projeto do satélite será relativa à escolha do melhor eixo para a realização da estabilização por spin.
32
Ano: 2022
Banca:
CESPE / CEBRASPE
Órgão:
Telebras
Prova:
CESPE / CEBRASPE - 2022 - Telebras - Especialista em Gestão de Telecomunicações – Engenheiro Aeroespacial |
Q1884100
Não definido
A respeito de sistemas de controle de atitude utilizados em satélites, julgue o item seguinte.
Em geral, giroscópios formam a base do sistema sensor para o controle de atitude do satélite; o motor do giroscópio é montado em um suporte móvel simples, controlado com alta precisão. A razão de precessão do giroscópio fornece a medida do torque necessária para o ajuste de qualquer eixo do satélite.
Em geral, giroscópios formam a base do sistema sensor para o controle de atitude do satélite; o motor do giroscópio é montado em um suporte móvel simples, controlado com alta precisão. A razão de precessão do giroscópio fornece a medida do torque necessária para o ajuste de qualquer eixo do satélite.
33
Ano: 2022
Banca:
CESPE / CEBRASPE
Órgão:
Telebras
Prova:
CESPE / CEBRASPE - 2022 - Telebras - Especialista em Gestão de Telecomunicações – Engenheiro Aeroespacial |
Q1884101
Não definido
A respeito de sistemas de controle de atitude utilizados em satélites, julgue o item seguinte.
Para o controle de atitude, sistemas sensores com partes móveis são largamente utilizados em satélites; o ring laser gyroscope (RLG) é composto apenas por uma combinação de vidros cerâmicos e várias fontes multi-espectrais de luz.
Para o controle de atitude, sistemas sensores com partes móveis são largamente utilizados em satélites; o ring laser gyroscope (RLG) é composto apenas por uma combinação de vidros cerâmicos e várias fontes multi-espectrais de luz.
34
Ano: 2022
Banca:
CESPE / CEBRASPE
Órgão:
Telebras
Prova:
CESPE / CEBRASPE - 2022 - Telebras - Especialista em Gestão de Telecomunicações – Engenheiro Aeroespacial |
Q1884102
Não definido
Julgue o item subsequente, com relação a veículos lançadores
orbitais e sub orbitais.
Ruídos de decolagem de veículos lançadores de satélites podem atingir níveis superior a 150 dB; o ruído aerodinâmico dos ignitores e das câmeras de combustão geram ondas de choque que podem resultar no colapso do veículo lançador.
Ruídos de decolagem de veículos lançadores de satélites podem atingir níveis superior a 150 dB; o ruído aerodinâmico dos ignitores e das câmeras de combustão geram ondas de choque que podem resultar no colapso do veículo lançador.
35
Ano: 2022
Banca:
CESPE / CEBRASPE
Órgão:
Telebras
Prova:
CESPE / CEBRASPE - 2022 - Telebras - Especialista em Gestão de Telecomunicações – Engenheiro Aeroespacial |
Q1884103
Não definido
A respeito dos princípios e conceitos da estática e da dinâmica
dos corpos rígidos, julgue o item seguinte.
Na situação a seguir, uma esfera homogênea com massa P repousa no plano inclinado de 30°, contra a parede vertical lisa B. Nessa situação, em módulo, o valor da força no plano inclinado é o dobro do valor da força na parede vertical.

Na situação a seguir, uma esfera homogênea com massa P repousa no plano inclinado de 30°, contra a parede vertical lisa B. Nessa situação, em módulo, o valor da força no plano inclinado é o dobro do valor da força na parede vertical.
36
Ano: 2022
Banca:
CESPE / CEBRASPE
Órgão:
Telebras
Prova:
CESPE / CEBRASPE - 2022 - Telebras - Especialista em Gestão de Telecomunicações – Engenheiro Aeroespacial |
Q1884104
Não definido
A respeito dos princípios e conceitos da estática e da dinâmica dos corpos rígidos, julgue o item seguinte.
Na situação a seguir, uma barra AD, suportada em dois apoios, B e C, está apoiada contra uma parede formando um ângulo θ. Nessa situação e considerando que em todos os pontos de apoio não há atrito, se a força F for aplicada na direção vertical, para cima, então será nula a reação da parede contra a barra na direção horizontal.

Na situação a seguir, uma barra AD, suportada em dois apoios, B e C, está apoiada contra uma parede formando um ângulo θ. Nessa situação e considerando que em todos os pontos de apoio não há atrito, se a força F for aplicada na direção vertical, para cima, então será nula a reação da parede contra a barra na direção horizontal.
37
Ano: 2022
Banca:
CESPE / CEBRASPE
Órgão:
Telebras
Prova:
CESPE / CEBRASPE - 2022 - Telebras - Especialista em Gestão de Telecomunicações – Engenheiro Aeroespacial |
Q1884105
Não definido
A respeito dos princípios e conceitos da estática e da dinâmica dos corpos rígidos, julgue o item seguinte.
Se, ao fazer uma curva de raio constante, o velocímetro de um veículo marcar o valor constante de 50 km/h, então o veículo não está sendo acelerado.
Se, ao fazer uma curva de raio constante, o velocímetro de um veículo marcar o valor constante de 50 km/h, então o veículo não está sendo acelerado.
38
Ano: 2022
Banca:
CESPE / CEBRASPE
Órgão:
Telebras
Prova:
CESPE / CEBRASPE - 2022 - Telebras - Especialista em Gestão de Telecomunicações – Engenheiro Aeroespacial |
Q1884106
Não definido
A respeito dos princípios e conceitos da estática e da dinâmica dos corpos rígidos, julgue o item seguinte.
Se, na decolagem, uma aeronave necessita atingir a velocidade mínima de 80 m/s, com uma aceleração mínima de 4 m/s2 para decolar, então a pista deverá ter pelo menos 800 m de comprimento, para uma decolagem segura.
Se, na decolagem, uma aeronave necessita atingir a velocidade mínima de 80 m/s, com uma aceleração mínima de 4 m/s2 para decolar, então a pista deverá ter pelo menos 800 m de comprimento, para uma decolagem segura.
39
Ano: 2022
Banca:
CESPE / CEBRASPE
Órgão:
Telebras
Prova:
CESPE / CEBRASPE - 2022 - Telebras - Especialista em Gestão de Telecomunicações – Engenheiro Aeroespacial |
Q1884107
Não definido
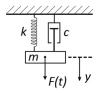
Julgue o item seguinte, considerando que, no sistema
massa-mola amortecido acima, m = 25 kg, k = 3.025 N/m e
c = 715 N.s/m.
O sistema em questão é sub-amortecido.
O sistema em questão é sub-amortecido.
40
Ano: 2022
Banca:
CESPE / CEBRASPE
Órgão:
Telebras
Prova:
CESPE / CEBRASPE - 2022 - Telebras - Especialista em Gestão de Telecomunicações – Engenheiro Aeroespacial |
Q1884108
Não definido
Julgue o item seguinte, considerando que, no sistema massa-mola amortecido acima, m = 25 kg, k = 3.025 N/m e c = 715 N.s/m.
A frequência natural do sistema em consideração é inferior a 20 Hz.
A frequência natural do sistema em consideração é inferior a 20 Hz.