Questões de Concurso Público IF-SP 2024 para Professor EBTT - Controle e Automação
Foram encontradas 40 questões
Um engenheiro de automação está programando um Controlador Lógico Programável
(CLP) para gerenciar o controle de um sistema de
esteiras em uma fábrica. O CLP é programado utilizando a linguagem Ladder para garantir que as
esteiras operem de maneira segura. A figura abaixo
mostra um diagrama Ladder utilizado para acionar
duas saídas, esteira 1 (Y1) e esteira 2 (Y2), com
base nas entradas X1, X2, X3 e X4.
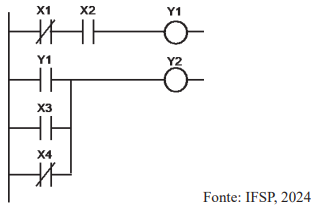
Com base no diagrama apresentado, analise as seguintes afirmativas:
I. Se a entrada X1 estiver desacionada, a esteira 1 será acionada, independentemente do estado de X2.
II. A esteira 2 será acionada se X3 e X4 forem acionadas.
III. Se todas as entradas estiverem desacionadas, a esteira 2 será acionada.
Quais afirmativas estão corretas?
O Modbus é um dos protocolos de comunicações industriais mais antigos e ainda muito utilizado nos dias atuais na industria. Sobre o protocolo de comunicação Modbus e suas variantes
Modbus RTU, Modbus ASCII e Modbus TCP/IP,
é correto afirmar:
A modelagem matemática representa uma etapa importante em projetos de engenharia de controle
em que, após a aplicação das leis fundamentais, simplificações e aproximações, é possível determinar
uma equação matemática capaz de representar de
forma próxima o comportamento dinâmico de um
determinado sistema, seja ele térmico, mecânico,
elétrico ou hidráulico. Deste modo, dado o circuito
eletrônico a seguir, obtenha a função de transferência que represente seu comportamento dinâmico,
considerando o amplificador operacional ideal.
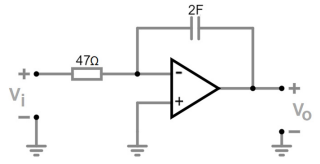
Fonte: IFSP, 2024
Um dos critérios no estudo da qualidade de sistemas de controle em malha fechada é
o Erro de regime permanente, determinado por
Ereg = 
Deste modo, determine-o para o sistema de primeira ordem representado no diagrama de blocos a seguir considerando uma entrada de degrau unitário.
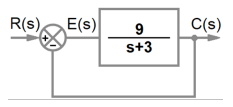
Fonte: IFSP, 2024
Um robô industrial é uma máquina programável de propósito geral que possui certas características antropomórficas, sendo o braço mecânico (ou manipulador) a característica antropomórfica mais óbvia. O manipulador, combinado com um controlador de alto nível, permite que um robô industrial realize várias tarefas como carregamento e descarregamento de máquinas e equipamentos, processo de soldagem e pintura pulverizada.
Em relação aos robôs industriais, pode-se afirmar
que: