Questões de Concurso Público IFB 2017 para Professor - Engenharia Elétrica
Foram encontradas 21 questões


Um sistema de controle é constituído de uma planta, cujo modelo em malha aberta apresenta 3
polos reais e nenhum zero finito. Fechando-se a malha com realimentação de saída e variando o
ganho de malha (K) positivamente de zero a infinito, os polos se deslocam seguindo as trajetórias
mostradas no lugar das raízes da figura acima.
Um sistema de controle é constituído de uma planta, cujo modelo em malha aberta apresenta 3
polos reais e nenhum zero finito. Fechando-se a malha com realimentação de saída e variando o
ganho de malha (K) positivamente de zero a infinito, os polos se deslocam seguindo as trajetórias
mostradas no lugar das raízes da figura acima.
Dois dos polos de malha fechada seguem trajetórias assintóticas no plano complexo, ou seja, tendem para o infinito seguindo retas inclinadas em relação ao eixo real, como pode ser visto no lugar geométrico das raízes apresentado.
O ângulo de inclinação da reta pontilhada é
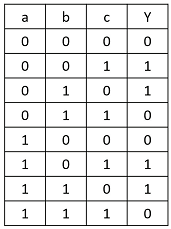
A tabela verdade de um circuito digital é apresentada a seguir. Sendo as entradas as variáveis ‘a’, ‘b’ e ‘c’, e a saída a variável ‘y’ qual expressão lógica que representa a saída em função das entradas?
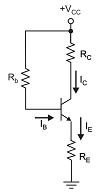
O transistor do circuito da figura a seguir é de silício, possui um ganho β = 100 e está polarizado na região ativa. Determine RE, Rb e RC sabendo que VCC = 20V, VCE = 3V, IB = 40µA e RC = 4RE .
A função de transferência de malha fechada de um sistema de controle é dada por

Este sistema possui, respectivamente, quantos polos e zeros finitos?
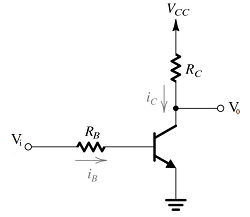
No o circuito da figura a seguir o transistor é de silício, possui um ganho β = 100 e está polarizado na região ativa. Sabendo que VCC = 12V, Vi = 4V, RB = 330kΩ e RC = 9kΩ qual é o valor de V0 ?
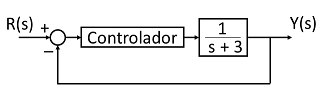
Qual é o erro em regime permanente do sistema de controle a seguir se o controlador utilizado for um do tipo Proporcional-Integral (PI) com constantes KP = 12, KI = 2, e a entrada for do tipo degrau?
Considere o seguinte x sistema dinâmico representado no Espaço de Estados
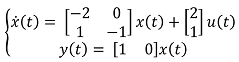
Pode-se dizer que este sistema é:
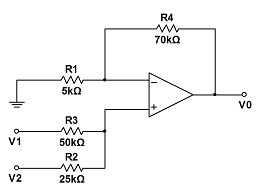
Utilizando superposição e considerando o Amp, Op. Ideal, calcule V0 em função de V1 e V2 no circuito da figura a seguir
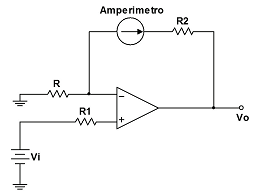
O circuito da figura a seguir apresenta um voltímetro analógico, no qual a medida lida no amperímetro é diretamente proporcional à tensão de entrada Vi. A resistência R2 corresponde à resistência do medidor e R1 corresponde à resistência da fonte de tensão da entrada. Considerando o amp. op. ideal, calcule o valor de R de tal forma que 1 mA lido corresponda a uma entrada Vi = 10 V.
Para o circuito da figura abaixo, todos os amplificadores são ideais, exceto pelo fato de possuírem correntes de polarização IB1 = IB2 = 10 µA. Para vi = 0 e RA = RB = 0. Determine os valores de Vo1, Vo2 e Vo3 devido às correntes de polarização.
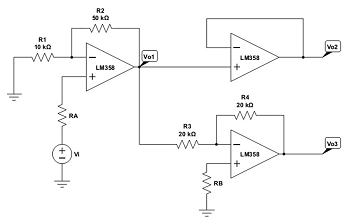
No circuito da figura abaixo, a tensão de offset de cada amplificador é Vos = 10 mV. Determine as tensões de saída Vo1 e Vo2 para Vi = 0.

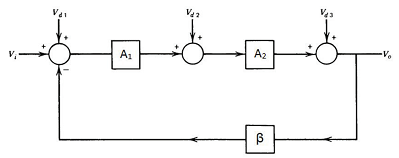
A realimentação negativa pode ser utilizada para reduzir a sensibilidade do sistema para certos tipos de distúrbios. Este tipo de vantagem é ilustrado na figura a seguir, que apresenta um sistema com 3 tipos distintos de distúrbios aplicados ao sistema. O distúrbio Vd1 é aplicado ao sistema junto com o sinal de entrada e está relacionado ao ruído associado ao próprio sinal de entrada. O distúrbio Vd2 é aplicado em um ponto médio do sistema e pode estar relacionado ao uma filtragem incorreta feita ao sinal proveniente da etapa inicial. Já o distúrbio Vd3 é aplicado na saída do sistema e pode estar relacionado com as mudanças da carga. Assim, analise, através da equação que relaciona Vo com Vi, A1 , A2 e β, se efeitos de distúrbio (Vd1, Vd2 e Vd3) serão reduzidos por conta da realimentação negativa. Considere que os ganhos de malha aberta A1 e A2 possuem valores muito altos e que β seja igual a 1.
Considere a seguinte EDO:

Encontre os pólos do sistema e determine se o sistema é estável ou instável. Considere o sistema
causal e com condições iniciais nulas.
Considere o sistema apresentado abaixo. Suponha a=1 e b=2.
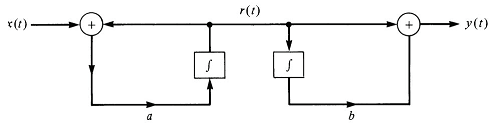
Determine a função de transferência do sistema. Este sistema é assintoticamente estável,
marginalmente estável ou instável?
Considere a seguinte função de transferência:
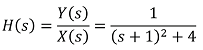
Considerando-se x(t)=u(t), determine, a partir de y(t), a resposta do sistema em estado estacionário.