Questões de Concurso Público IF-SE 2024 para Professor EBTT - Eletrotécnica
Foram encontradas 6 questões
Ano: 2024
Banca:
IV - UFG
Órgão:
IF-SE
Prova:
IV - UFG - 2024 - IF-SE - Professor EBTT - Eletrotécnica |
Q2573756
Engenharia Eletrônica
O mapa de Karnaugh a seguir foi construído a partir de uma tabela-verdade com 3 entradas: A, B e C e uma saída S.
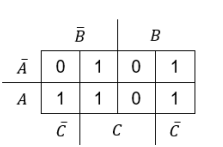
Elaborado pelo(a) autor(a).
Uma expressão lógica para a saída S, a partir do mapa
mostrado, é
Ano: 2024
Banca:
IV - UFG
Órgão:
IF-SE
Prova:
IV - UFG - 2024 - IF-SE - Professor EBTT - Eletrotécnica |
Q2573757
Engenharia Eletrônica
O circuito lógico mostrado na figura a seguir possui entrada
A, B, C e saída X, Y.
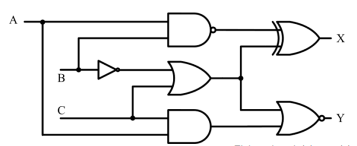
Elaborado pelo(a) autor(a).
A saída X, Y que corresponde a uma entrada A, B, C = 1, 1, 0 é
Elaborado pelo(a) autor(a).
A saída X, Y que corresponde a uma entrada A, B, C = 1, 1, 0 é
Ano: 2024
Banca:
IV - UFG
Órgão:
IF-SE
Prova:
IV - UFG - 2024 - IF-SE - Professor EBTT - Eletrotécnica |
Q2573758
Engenharia Eletrônica
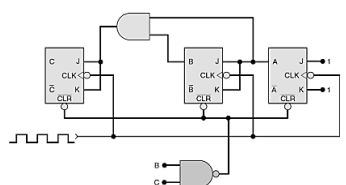
A figura a seguir mostra um contador síncrono de 3 bits.
TOCCI, Ronald J. WIDMER, Neal S. MOSS, Gregory L. Sistemas Digitais –
princípios e aplicações. Pearson Prentice-Hall, 10ª edição, 2007. Disponível
em: <
https://ia600808.us.archive.org/1/items/SistemasDigitaisPrincpiosEAplicaaes
10EdRonaldJ.Tocci_201708/Sistemas%20Digitais%20-
%20Princ%C3%ADpios%20e%20Aplica%C3%A7%C3%B5es%20-
%2010%C2%AA%20Ed-Ronald%20J.%20Tocci.pdf>. Acesso em: 25 jun. 2024.
O contador mostrado é de módulo
Ano: 2024
Banca:
IV - UFG
Órgão:
IF-SE
Prova:
IV - UFG - 2024 - IF-SE - Professor EBTT - Eletrotécnica |
Q2573759
Engenharia Eletrônica
A linguagem Ladder é uma linguagem que usa símbolos
gráficos padronizados na programação de controladores
lógicos programáveis (CLPs). O diagrama a seguir
representa um código em linguagem Ladder usada para o
acionamento do componente Y.
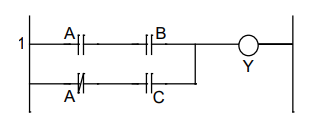
Elaborado pelo(a) autor(a).
Na programação mostrada, uma das possibilidades para que Y seja verdadeiro é
Elaborado pelo(a) autor(a).
Na programação mostrada, uma das possibilidades para que Y seja verdadeiro é
Ano: 2024
Banca:
IV - UFG
Órgão:
IF-SE
Prova:
IV - UFG - 2024 - IF-SE - Professor EBTT - Eletrotécnica |
Q2573760
Engenharia Eletrônica
As linguagens de programação de controladores lógicos
programáveis (CLPs) são classificadas em linguagens
textuais e linguagens gráficas. Uma linguagem que é
classificada como textual é a linguagem
Ano: 2024
Banca:
IV - UFG
Órgão:
IF-SE
Prova:
IV - UFG - 2024 - IF-SE - Professor EBTT - Eletrotécnica |
Q2573761
Engenharia Eletrônica
O controle em malha fechada é um método de controle
automático em que a ação de controle é baseada na
diferença entre a saída desejada para o sistema e a saída
real. O objetivo do controle é minimizar o erro entre as duas
saídas. O controlador PID (Proporcional, Integral,
Derivativo) é um dos controladores mais comuns usado
nesse processo. Quanto à ação da componente Integral do
controlador PID, ela