Questões de Concurso Sobre controladores (proporcional, pi e pid) em engenharia eletrônica
Foram encontradas 147 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!

Considere o sistema representado pelo diagrama de blocos acima,
no qual se tem uma planta, um controlador e uma malha de
realimentação. Nesse diagrama, T representa uma constante e s é o
operador da transformada de Laplace. Acerca desse sistema, julgue
os itens subsequentes.
Considere o sistema representado pelo diagrama de blocos acima,
no qual se tem uma planta, um controlador e uma malha de
realimentação. Nesse diagrama, T representa uma constante e s é o
operador da transformada de Laplace. Acerca desse sistema, julgue
os itens subsequentes.
As modernas máquinas de lavar roupa, em que é possível controlar desde a quantidade de água até o tempo do ciclo de lavagem, são modelos de sistemas de controle de malha fechada aplicado ao cotidiano.
Considere as informações a seguir para responder à questão.
O controle de atitude de um satélite em órbita consiste em ajustar, automaticamente, o ângulo de seu eixo, de modo a direcionar sua antena para a região desejada na superfície da Terra. O modelo simplificado desse sistema consta de um sinal de entrada, que é o torque τ(t), e de um sinal de saída, que é o ângulo θ(t). Considerando o vetor de estado X(t)=  definido com x1(t) =
definido com x1(t) =  (t) , posição angular e x2(t) = (t) = dθ / dt , a velocidade angular, obtém-se o seguinte modelo em espaço de estado.
(t) , posição angular e x2(t) = (t) = dθ / dt , a velocidade angular, obtém-se o seguinte modelo em espaço de estado.
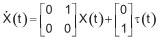 e y(t) = [1,0] x(t)
e y(t) = [1,0] x(t)
Aplicando uma realimentação de estado, com a lei de controle dada por τ(t)= - KX(t)= -[k1 k2] X(t), o valor do vetor de ganhos K, que conduz os polos em malha fechada para as posições -2 e -3, é
