Questões de Concurso
Foram encontradas 18 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
Julgue o item subsequente, a respeito de instrumentação industrial e de conceitos sobre sistemas de supervisão.
Transmissores são dispositivos que comutam grandezas
físicas em sinais elétricos mensuráveis sobre o estado do
processo e enviam os valores processados e interpretados
para sistemas de controle ou monitoramento.
( ) Os mancais são classificados como deslizantes ou de rolamento.
( ) Mancais de rolamento são aplicados quando se deseja reduzir o atrito na partida em eixos em movimentos rotativos.
( ) Os mancais de deslizamento dispõem de roletes, sendo aplicados em máquinas pesadas.
( ) Os rolamentos são classificados, de acordo a direção das forças que suportam, em radiais ou de tração.
( ) Em situações em que desalinhamentos de eixos ou montagem possam ocorrer, é recomendada a utilização de rolamentos autocompensadores de esferas.
Procedimento busca (V,N,x) A ← 1 Z ← N Enquanto x não for encontrado se Z < A então retorna x não existe em V. m ← A + (Z - A) / 2 se V[m] < x então A ← m + 1 se V[m] > x então Z ← m - 1 se V[m] = x então retorna x encontrado fim Enquanto fim Procedimento
Assinale a opção que representa a complexidade do algoritmo utilizando a notação Big O.
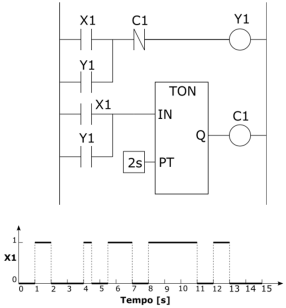
Desprezando-se o tempo de varredura do CLP, o tempo, em segundos, em que Y1 permanece em nível lógico 1 no intervalo de 0 a 15s é
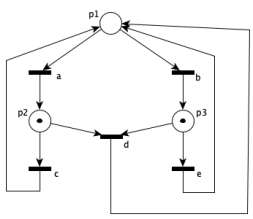
A transição que possui a propriedade de ser não viva é a transição
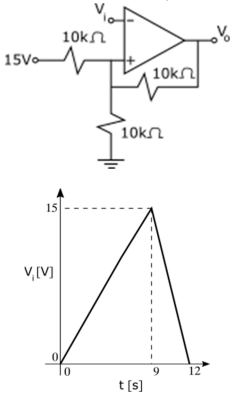
Considerando-se que de 0 a 12 segundos o sinal Vi apresenta a variação indicada na figura e que Vo = 15V em t = 0s, o tempo total, em segundos em que Vo permanece em 0V no intervalo de 0 a 12 segundos é
A comunicação entre computadores e equipamentos pode ser realizada através de protocolos de redes de comunicação serial do tipo RS-232, também definido como EIA RS-232C. A comunicação serial nesse protocolo é estabelecida entre um DTE – Equipamento Terminal de Dados e um DCE – Equipamento de comunicação de Dados, através dos modos simplex, half-duplex e full-duplex.
Considerando os modos de transmissão do protocolo RS-232, o número mínimo de condutores necessários para o modo full-duplex é
Um robô industrial foi implantado em uma célula de manufatura com a função de inspecionar as dimensões de peças plásticas. A medição das dimensões das peças é realizada por meio de um sensor instalado no efetuador final do robô, sem que seja necessário o contato físico com a peça.
De acordo com essas informações, o dispositivo que foi instalado no efetuador final do robô é um sensor do tipo
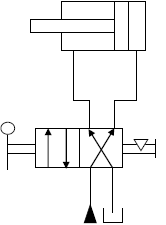
No circuito hidráulico, a seguir, sabe-se que o diâmetro do pistão é de 100 mm, o diâmetro da haste é de 25 mm, e o curso do pistão é de 200 mm. Além disso, a bomba fornece uma vazão de 0,3 litros por segundo. Dessa maneira, o tempo de avanço completo da haste do pistão e sua velocidade de avanço são respectivamente (adote π = 3)
I. A eletroerosão por penetração é mais utilizada que a fio devido ao uso intensivo de eletrodos de diamante. II. A eletroerosão a fio se torna mais atrativa quando há a necessidade de se usinar cavidades passantes em perfis complexos. III. Uma das limitações da eletroerosão é a geração de calor intenso e tensões altas na superfície da peça limitando seu uso para peças que não requeiram alta qualidade e alterações microestruturais. IV. Na operação por eletroerosão, a peça e o eletrodo são mergulhados em um fluido dielétrico, o mais utilizado é a água. V. No processo de eletroerosão, a erosão ocorre de forma simultânea na peça e no eletrodo.
Estão CORRETAS as afirmações presentes nas alternativas
Julgue o item a seguir, relativo ao princípio de robótica.
O robô de coordenadas cartesianas utiliza três juntas
rotacionais.
A mecânica dos corpos rígidos pode ser dividida em estática, que se refere ao equilíbrio de um corpo rígido, e dinâmica, que se relaciona ao movimento de um corpo rígido. Acerca desse assunto, julgue o item que se segue.
O centro de massa de um corpo pode estar localizado em um
ponto espacial fora do corpo.
A parte fixa, onde, normalmente, existem campos magnéticos fixos gerados por ímãs permanentes, é o(a)
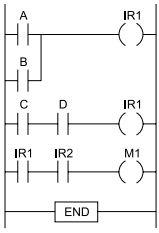
Considerando as informações apresentadas, a expressão lógica equivalente ao código Ladder é