Questões de Concurso
Foram encontradas 2.168 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
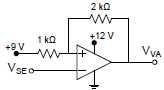
Considere que:
• VVA aciona a válvula de entrada de fluído, que permite a entrada de fluído no reservatório quando a tensão em seus terminais é +12V, e permanece fechada caso contrário; • VSE é o sinal de um sensor de pressão no fundo do reservatório, que produz um sinal de 2V para cada metro de coluna de água (mca) do reservatório; • O reservatório é cilíndrico, com área de seção transversal de 10m2 .
Este controle faz o reservatório ter um volume de fluído entre
Um circuito digital tem A, B e C como entradas. A sua saída é dada pela função:

A função F pode ser reduzida a
A figura a seguir apresenta três curvas que correspondem às respostas de três funções de transferência. Relacione essas curvas com o fator de amortecimento ξ:
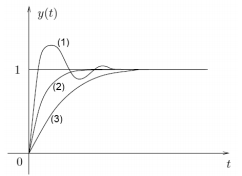
fator de amortecimento ξ:
( ) 0 < ξ < 1
( ) ξ < 1
( ) ξ = 1
Assinale a alternativa que mostra a relação correta, de cima para
baixo:
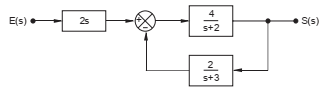
O seguinte diagrama representa uma malha de controle com realimentação:
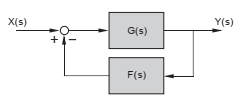
A função de transferência da malha é
Atenção: Considere as informações abaixo para responder à questão.
Deseja-se acionar o motor M1 por meio de dois botões: B1 para a parada do motor e B2 para a partida do motor. A Figura a) apresenta a ligação dos dispositivos em um CLP hipotético e a Figura b) apresenta a lógica de acionamento do motor M1, representada em um Diagrama em Escada. Ao ligar o sistema, supor M1 parado.

a) Acionamento do motor por meio de um CLP.

b) Diagrama em Escada para o acionamento do
motor.
Um dos padrões de comunicação digital utilizados em sistemas de controle em mecatrônica é o RS-232, que permite a transmissão de dados em diversos formatos, como o seguinte:

Os bits do dado transmitido (b0 ... b7) são precedidos pelo
start bit, e sucedidos por dois stop bits. Nessa situação, a
máxima eficiência de comunicação do RS-232 é, aproximadamente,
A modulação é um dos recursos utilizados para tornar a comunicação à distância mais eficiente e se baseia na modificação contínua (modulação) de um sinal periódico de maior frequência, conforme a seguinte função:
x(t) = A(t) sen[W(t).t + P(t)]
A modulação realizada por meio do termo W(t) é conhecida como
Analise as proposições seguintes sobre tiristores:
I. O DIAC pode conduzir corrente nos dois sentidos, desde que a tensão aplicada ao terminal de gatilho (gate) seja bipolar.
II. O TRIAC pode conduzir corrente nos dois sentidos, mas o disparo só ocorre por tensão entre os terminais anodo e catodo.
III. Após o disparo do SCR, a corrente no terminal de gatilho (gate) é desnecessária para que ele permaneça em condução, desde que a corrente entre anodo e catodo seja igual ou maior que a corrente de manutenção (holding current).
Está correto o que consta APENAS em
Analise a estrutura do circuito integrado MOC 3011 abaixo.
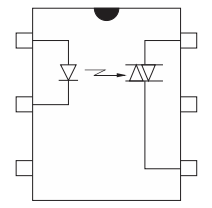
Trata-se de um
Considere o sistema de controle abaixo.
Os zeros da função de transferência do sistema valem
Analise o circuito digital abaixo.
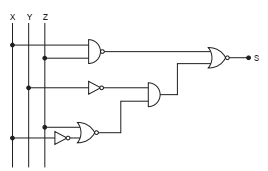
A expressão simplificada de saída é
Considere a expressão lógica representada como

A.(A + B) +(A + B).(A + C) +B.(A + C)
Ao empregar as leis da Álgebra Booleana, a expressão simplificada ficaria
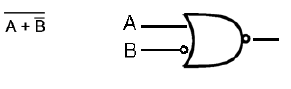
Considere a porta lógica a seguir, cuja expressão lógica é

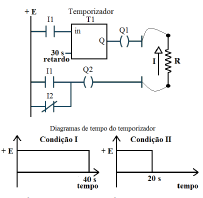
O sinal que comanda o temporizador inicia-se no mesmo tempo em que a fonte +E é ligada.
Dessa forma, a energia elétrica dissipada na resistência R durante 1 minuto, considerando as condições I e II do temporizador são, respectivamente, iguais a:
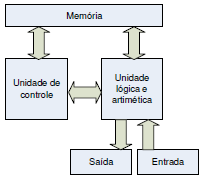
A figura a seguir mostra o esquema de um microcontrolador com seus componentes.
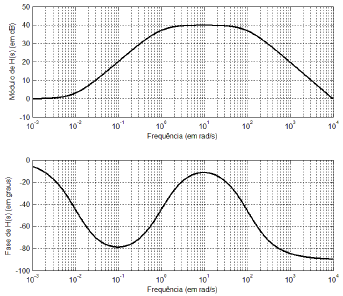
A partir da análise do gráfico, conclui-se que H(s)
O diagrama a seguir apresenta uma variante desse tipo de controlador, denominado aqui controlador modificado, a partir da modificação na estrutura clássica PID, onde:
• G(s) é a função de transferência de planta; • r(s), u(s), d(s) e y(s) são os sinais de entrada da referência, saída do controlador, entrada da perturbação e saída do sistema, respectivamente; • KP, TI e TD são os parâmetros do controlador modificado.
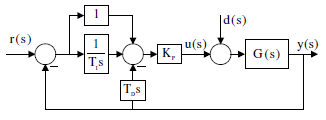
Uma das diferenças entre o controlador modificado e o controlador PID clássico é a capacidade que aquele tem de