Questões de Concurso
Para transpetro
Foram encontradas 6.552 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
Ano: 2023
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2023 - Transpetro - Profissional Transpetro de Nível Superior - Junior: Ênfase 17: Engenharia de Automação |
Q2328604
Engenharia de Automação
Na Figura abaixo está representado um circuito RLC em série.
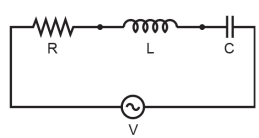
Considerado-se todos os componentes desse circuito
como ideais — o Resistor (R), o indutor (L), o capacitor
(C), e a fonte de tensão (V) — constata-se que
Ano: 2023
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2023 - Transpetro - Profissional Transpetro de Nível Superior - Junior: Ênfase 17: Engenharia de Automação |
Q2328603
Engenharia de Automação
Um multímetro mediu 21 V como o valor Root Mean Square (RMS) da tensão de um sinal senoidal ideal.
Qual é o valor, em volts, da tensão pico a pico desse sinal senoidal?
Dado
√2 = 1,4
√3 = 1,7
Ano: 2023
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2023 - Transpetro - Profissional Transpetro de Nível Superior - Junior: Ênfase 17: Engenharia de Automação |
Q2328602
Engenharia de Automação
Alguns osciloscópios digitais modernos permitem selecionar o uso de interpolação seno(x)/x para medir sinais
senoidais. A indicação prática para uso desse tipo de medição recomendada pelo fabricante é que o osciloscópio
tenha uma taxa de amostragem pelo menos 2,5 vezes o
componente de frequência mais alta do seu sinal.
Considerando-se a recomendação do fabricante, a interpolação mencionada acima e o uso de um osciloscópio digital com capacidade de 1 GSa/s (109 amostras por segundo), qual será a frequência máxima de um sinal senoidal ideal que poderá ser medida?
Considerando-se a recomendação do fabricante, a interpolação mencionada acima e o uso de um osciloscópio digital com capacidade de 1 GSa/s (109 amostras por segundo), qual será a frequência máxima de um sinal senoidal ideal que poderá ser medida?
Ano: 2023
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2023 - Transpetro - Profissional Transpetro de Nível Superior - Junior: Ênfase 17: Engenharia de Automação |
Q2328601
Engenharia de Automação
O microcontrolador ATmega328/P, da Atmel, usado em
placas Arduino, possui 6 saídas com suporte Pulse Width
Modulation (PWM) ou, em português, Modulação por Largura de Pulso.
Pode-se usar, por exemplo, o modo Fast PWM com o TIMER 2, de 8 bits, para gerar formas de onda com diferentes duty cycles, ou ciclos de trabalho em português. Considere que a fórmula do ciclo de trabalho C é:
C = (REG+1)/256, onde C = ciclo de trabalho e REG é o valor colocado no registro OCR2A de 8 bits (de 0 a 255 em decimal). O valor de 0 equivale a ciclo de trabalho de 0% enquanto o valor de 1 equivale ao ciclo de trabalho de 100%.
Para um sistema de controle de iluminação, atribuiu-se o valor REG = 63, usando uma das saídas do TIMER2.
Qual é o valor do ciclo de trabalho nessa saída?
Pode-se usar, por exemplo, o modo Fast PWM com o TIMER 2, de 8 bits, para gerar formas de onda com diferentes duty cycles, ou ciclos de trabalho em português. Considere que a fórmula do ciclo de trabalho C é:
C = (REG+1)/256, onde C = ciclo de trabalho e REG é o valor colocado no registro OCR2A de 8 bits (de 0 a 255 em decimal). O valor de 0 equivale a ciclo de trabalho de 0% enquanto o valor de 1 equivale ao ciclo de trabalho de 100%.
Para um sistema de controle de iluminação, atribuiu-se o valor REG = 63, usando uma das saídas do TIMER2.
Qual é o valor do ciclo de trabalho nessa saída?
Ano: 2023
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2023 - Transpetro - Profissional Transpetro de Nível Superior - Junior: Ênfase 17: Engenharia de Automação |
Q2328600
Engenharia de Automação
Um sistema possui um conversor Digital/Analógico (D/A)
de oito bits que produz uma tensão de saída em função do
valor escrito em um registro interno de um 1 byte.
Para se ter tensão de saída de 5 V, é escrito no registro o valor em notação binária 11111111, e, para a tensão de saída de 0 V, o valor 00000000.
Considerando-se que o conversor D/A tenha funcionamento linear, qual dos valores abaixo deverá ser escrito no registro acima, em notação binária, para gerar uma tensão de saída próxima a 1,25 V?
Para se ter tensão de saída de 5 V, é escrito no registro o valor em notação binária 11111111, e, para a tensão de saída de 0 V, o valor 00000000.
Considerando-se que o conversor D/A tenha funcionamento linear, qual dos valores abaixo deverá ser escrito no registro acima, em notação binária, para gerar uma tensão de saída próxima a 1,25 V?
Ano: 2023
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2023 - Transpetro - Profissional Transpetro de Nível Superior - Junior: Ênfase 17: Engenharia de Automação |
Q2328599
Engenharia de Automação
Um automóvel possui uma bateria ideal com capacidade
de 70 Ah, sem perdas internas, e que pode fornecer toda
sua energia armazenada.
Considerando-se que o carro está desligado, o alarme eletrônico está ativado e consumindo de forma constante 100 mA, em quantos dias, aproximadamente, a energia da bateria será consumida?
Considerando-se que o carro está desligado, o alarme eletrônico está ativado e consumindo de forma constante 100 mA, em quantos dias, aproximadamente, a energia da bateria será consumida?
Ano: 2023
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2023 - Transpetro - Profissional Transpetro de Nível Superior - Junior: Ênfase 17: Engenharia de Automação |
Q2328598
Engenharia de Automação
No circuito abaixo, considere a existência de um amplificador operacional ideal. Considere, também, os componentes indicados na Figura.
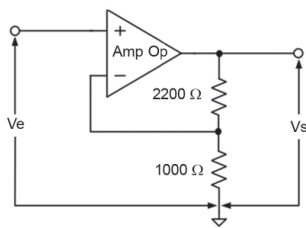
Qual será o valor, em volts, da tensão de saída Vs se for aplicada a tensão de entrada Ve no valor de 3 V?
Qual será o valor, em volts, da tensão de saída Vs se for aplicada a tensão de entrada Ve no valor de 3 V?
Ano: 2023
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2023 - Transpetro - Profissional Transpetro de Nível Superior - Junior: Ênfase 17: Engenharia de Automação |
Q2328597
Engenharia de Automação
Em um sistema de controle automatizado, em malha fechada, também conhecido como sistema de controle por
realimentação, o elemento responsável pela execução física das ações de controle é o
Ano: 2023
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2023 - Transpetro - Profissional Transpetro de Nível Superior - Junior: Ênfase 17: Engenharia de Automação |
Q2328596
Engenharia de Automação
As ferramentas computacionais são largamente utilizadas
pelas indústrias para aumentar sua eficiência e competitividade. Várias dessas ferramentas têm aplicação em robótica, em automação, em integração da produção e em
gestão.
Uma dessas ferramentas destina-se ao controle do movimento e da velocidade de seus eixos ao longo de um processamento de uma peça.
A ferramenta citada é:
Uma dessas ferramentas destina-se ao controle do movimento e da velocidade de seus eixos ao longo de um processamento de uma peça.
A ferramenta citada é:
Ano: 2023
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2023 - Transpetro - Profissional Transpetro de Nível Superior - Junior: Ênfase 17: Engenharia de Automação |
Q2328595
Engenharia de Automação
Os Controladores Lógicos Programáveis (CLP) foram
desenvolvidos na segunda metade do século passado e
hoje têm aplicação acentuada na indústria.
A seguinte caracterização NÃO descreve adequadamente um CLP:
A seguinte caracterização NÃO descreve adequadamente um CLP:
Ano: 2023
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2023 - Transpetro - Profissional Transpetro de Nível Superior - Junior: Ênfase 17: Engenharia de Automação |
Q2328594
Engenharia de Automação
Em um sistema supervisório, é possível monitorar e controlar uma planta industrial, permitindo ações proativas a
fim de melhorar a produtividade da planta.
A seguinte caracterização NÃO descreve adequadamente um sistema supervisório:
A seguinte caracterização NÃO descreve adequadamente um sistema supervisório:
Ano: 2023
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2023 - Transpetro - Profissional Transpetro de Nível Superior - Junior: Ênfase 17: Engenharia de Automação |
Q2328593
Engenharia de Automação
A International Organization for Standardization (ISO), na
norma técnica ISO 8373, define robô como:
um manipulador multifuncional, controlado automaticamente, reprogramável, com três ou mais eixos, que pode estar fixo em determinado local ou ser móvel, utilizado em aplicações industriais.
Dentre os robôs industriais, os robôs articulados têm destaque. Eles podem ter vários eixos, todos rotativos. Para que o controlador do robô possa determinar as necessidades de posicionamento de cada braço ou elo, cada eixo possui um sensor que fornece informações para o controlador.
Dos sensores abaixo, qual é o utilizado nos robôs articulados?
um manipulador multifuncional, controlado automaticamente, reprogramável, com três ou mais eixos, que pode estar fixo em determinado local ou ser móvel, utilizado em aplicações industriais.
Dentre os robôs industriais, os robôs articulados têm destaque. Eles podem ter vários eixos, todos rotativos. Para que o controlador do robô possa determinar as necessidades de posicionamento de cada braço ou elo, cada eixo possui um sensor que fornece informações para o controlador.
Dos sensores abaixo, qual é o utilizado nos robôs articulados?
Ano: 2023
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2023 - Transpetro - Profissional Transpetro de Nível Superior - Junior: Ênfase 17: Engenharia de Automação |
Q2328592
Engenharia de Automação
As válvulas pneumáticas proporcionais são utilizadas no
comando de precisão e reguladas por sinais analógicos
proporcionais. Esse tipo de válvula é utilizado para controle de pressão e vazão.
Das situações abaixo, qual NÃO é adequada à utilização de válvula proporcional em operações de controle?
Das situações abaixo, qual NÃO é adequada à utilização de válvula proporcional em operações de controle?
Ano: 2023
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2023 - Transpetro - Profissional Transpetro de Nível Superior - Junior: Ênfase 17: Engenharia de Automação |
Q2328591
Engenharia de Automação
Um sistema automatizado é composto por três elementos: 1 - Sistema de Energia; 2 - Programa de Instruções;
e 3 - Sistema de Controle.
Considerando-se uma operação automatizada de torneamento, o programa de instruções
Considerando-se uma operação automatizada de torneamento, o programa de instruções
Ano: 2023
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2023 - Transpetro - Profissional Transpetro de Nível Superior - Junior: Ênfase 17: Engenharia de Automação |
Q2328590
Engenharia de Automação
Pode-se definir Sistema de Manufatura como uma coleção de equipamentos e recursos humanos integrados,
com a função de realizar tarefas e operações de processamentos de fabricação e montagem.
Alguns exemplos de Sistema de Manufatura são: células individuais, agrupamento de máquinas, linha de montagem manual, linha de transferência automatizada, sistema de montagem automatizado, células de máquinas, sistema de manufatura flexível, e outros.
A seguinte descrição representa um Sistema de Manufatura Flexível:
Alguns exemplos de Sistema de Manufatura são: células individuais, agrupamento de máquinas, linha de montagem manual, linha de transferência automatizada, sistema de montagem automatizado, células de máquinas, sistema de manufatura flexível, e outros.
A seguinte descrição representa um Sistema de Manufatura Flexível:
Ano: 2023
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2023 - Transpetro - Profissional Transpetro de Nível Superior - Junior: Ênfase 17: Engenharia de Automação |
Q2328589
Engenharia de Automação
O dispositivo que recebe na entrada uma grandeza física
e emite uma saída, que pode ser a mesma grandeza física ou não, é o
Ano: 2023
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2023 - Transpetro - Profissional Transpetro de Nível Superior - Junior: Ênfase 17: Engenharia de Automação |
Q2328588
Engenharia de Automação
Nas entradas e na saída de um Controlador Lógico Programável (CLP) estão conectados os seguintes componentes:
Entradas:
X0 = Botão retentivo de 2 posições, sendo, na posição 1, automático; na posição 2, manual.
X1 = Sensor S1
X2 = Sensor S2
X3 = Botão liga pulsante
X4 = Botão desliga pulsante
Nota: O botão retentivo na entrada X0 , na posição 1 (automático) emite um sinal na entrada. Se na posição 2 (manual) não emite sinal na entrada.
Saída: Y0 = Bomba d’água
O programa em Ladder instalado no CLP é o seguinte:
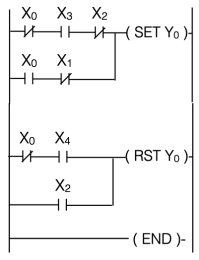
Analisando-se o programa, constata-se que o sistema em
Entradas:
X0 = Botão retentivo de 2 posições, sendo, na posição 1, automático; na posição 2, manual.
X1 = Sensor S1
X2 = Sensor S2
X3 = Botão liga pulsante
X4 = Botão desliga pulsante
Nota: O botão retentivo na entrada X0 , na posição 1 (automático) emite um sinal na entrada. Se na posição 2 (manual) não emite sinal na entrada.
Saída: Y0 = Bomba d’água
O programa em Ladder instalado no CLP é o seguinte:
Analisando-se o programa, constata-se que o sistema em
Ano: 2023
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2023 - Transpetro - Profissional Transpetro de Nível Superior - Junior: Ênfase 17: Engenharia de Automação |
Q2328587
Engenharia de Automação
Os esquemas pneumático e elétrico de controle de um determinado dispositivo eletropneumático são mostrados abaixo.
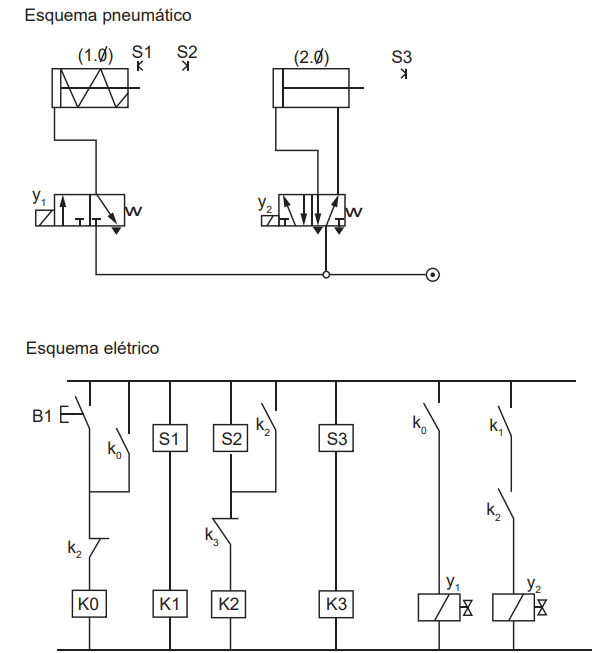
Pode-se apresentar o trajeto-passo de um circuito pneumático, escrevendo em sequência o número do atuador e o sinal + ou -, indicando avanço ou recuo respectivamente. Por exemplo: 1+ 2+ 1- 2- significa que o atuador 1 avança, em seguida o atuador 2 avança, em seguida o atuador 1 recua, e, finalmente, o atuador 2 recua.
Considerando-se os esquemas pneumático e elétrico acima, qual sequência de atuação é a correta, após acionamento do botão B1?
Pode-se apresentar o trajeto-passo de um circuito pneumático, escrevendo em sequência o número do atuador e o sinal + ou -, indicando avanço ou recuo respectivamente. Por exemplo: 1+ 2+ 1- 2- significa que o atuador 1 avança, em seguida o atuador 2 avança, em seguida o atuador 1 recua, e, finalmente, o atuador 2 recua.
Considerando-se os esquemas pneumático e elétrico acima, qual sequência de atuação é a correta, após acionamento do botão B1?
Ano: 2023
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2023 - Transpetro - Profissional Transpetro de Nível Superior - Junior: Ênfase 23: Engenharia Geotécnica |
Q2328186
Geologia
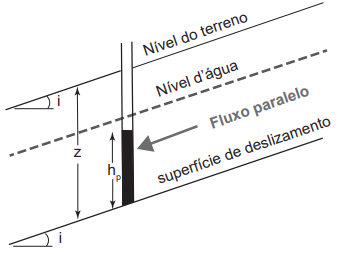
A Figura acima apresenta um talude “infinito”, que é aquele no qual a extensão é bem maior do que a espessura.
Sendo m = hp/z, onde “hp” é a altura piezométrica e “z” a altura de solo, o Fator de Segurança
Ano: 2023
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2023 - Transpetro - Profissional Transpetro de Nível Superior - Junior: Ênfase 23: Engenharia Geotécnica |
Q2328185
Geologia
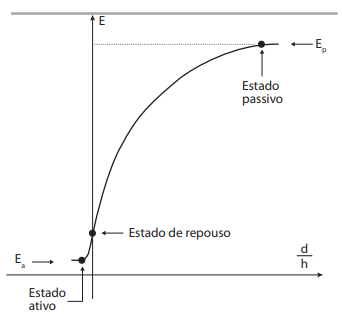
FERNANDES, Manuel de Matos. Mecânica dos Solos: introdução à Engenharia Geotécnica, v. 2. São Paullo: Oficina de Textos, 2014.
Na Figura acima, (d) representa o deslocamento do muro, (h), a altura do muro, e (E), o empuxo atuante no muro.
Nesse contexto, considerando-se a Figura, verifica-se que