Questões de Concurso
Para técnico de exploração de petróleo júnior
Foram encontradas 289 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
Ano: 2010
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2010 - Petrobras - Técnico de Exploração de Petróleo Júnior |
Q188678
Engenharia Cartográfica
Para a obtenção de imagens de Sensoriamento Remoto, é utilizada radiação eletromagnética. Nessa perspectiva, analise as fontes de radiação a seguir.
I - Sol
II - Corpo Negro
III - Terra
IV - O próprio sensor
Em Sensoriamento Remoto utilizam-se APENAS as fontes de radiação:
I - Sol
II - Corpo Negro
III - Terra
IV - O próprio sensor
Em Sensoriamento Remoto utilizam-se APENAS as fontes de radiação:
Ano: 2010
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2010 - Petrobras - Técnico de Exploração de Petróleo Júnior |
Q188677
Engenharia Cartográfica
Na coluna à esquerda da tabela abaixo, aparecem os nomes de diferentes sistemas sensores, na coluna do meio são indicados o número e a largura (em nm e/ou em μm) da(s) banda(s) espectral(ais) em que os sensores operam, enquanto na coluna à direita são indicadas as resoluções espaciais correspondentes.
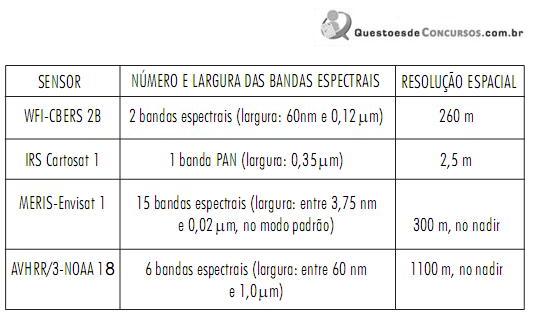
Entre os sistemas sensores mencionados acima, os de melhor resolução espectral e espacial são, respectivamente,
Entre os sistemas sensores mencionados acima, os de melhor resolução espectral e espacial são, respectivamente,
Ano: 2010
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2010 - Petrobras - Técnico de Exploração de Petróleo Júnior |
Q188676
Engenharia Cartográfica
O instrumento imageador ASTER, resultante de um esforço conjunto entre os EUA e o Japão, foi lançado em 1999 a bordo do satélite Terra e é constituído por 3 subsistemas sensores separados, cada um dos quais operando com uma resolução espacial diferente. Na coluna à esquerda, abaixo, estão as resoluções espaciais dos referidos subsistemas. Associe cada resolução ao correspondente subsistema sensor, escolhido entre os constantes na coluna direita.
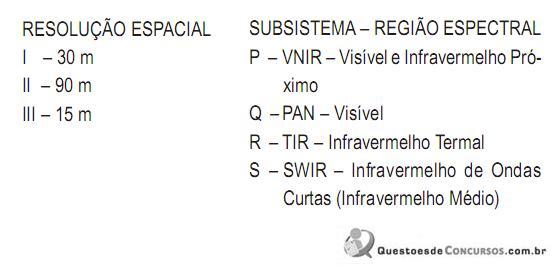
As associações corretas são
As associações corretas são
Ano: 2010
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2010 - Petrobras - Técnico de Exploração de Petróleo Júnior |
Q188675
Banco de Dados
Atualmente, a principal diferença entre os Sistemas de Informações Geográficas (SIGs) é a forma como os dados geográficos são gerenciados. Há, basicamente, três diferentes arquiteturas de SIGs que utilizam os recursos de um Sistema de Gerenciamento de Banco de Dados (SGBD):
I - dual.
II - integrada baseada em SGBDs relacionais .
III - integrada baseada em extensões espaciais sobre SGBDs objeto-relacionais.
IV - integrada em rede.
V - extensível.
São corretas APENAS
I - dual.
II - integrada baseada em SGBDs relacionais .
III - integrada baseada em extensões espaciais sobre SGBDs objeto-relacionais.
IV - integrada em rede.
V - extensível.
São corretas APENAS
Ano: 2010
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2010 - Petrobras - Técnico de Exploração de Petróleo Júnior |
Q188674
Engenharia Cartográfica
A solução do vetor de ambiguidades, presente numa linha base a determinar, requer que a geometria envolvida entre as estações e os satélites se altere, devendo-se, então, coletar os dados, pelo menos, duas vezes em curtos períodos na mesma estação. Qual o método de posicionamento que se baseia nesse fato?
Ano: 2010
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2010 - Petrobras - Técnico de Exploração de Petróleo Júnior |
Q188673
Engenharia Cartográfica
No posicionamento relativo cinemático em tempo real (RTK), para que os dados possam ser processados em tempo real, é necessário que sejam coletados na estação de referência e transmitidos para o receptor móvel, necessitando de um link de rádio. Trata-se de um método similar ao DGPS em tempo real, considerando que, nesse caso, utiliza(m)-se
Ano: 2010
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2010 - Petrobras - Técnico de Exploração de Petróleo Júnior |
Q188672
Engenharia Cartográfica
Posicionamento é definido como a determinação da posição de objetos com relação a um referencial específico. Quando as coordenadas de um objeto estão associadas diretamente ao geocentro, o método de posicionamento é conhecido como
Ano: 2010
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2010 - Petrobras - Técnico de Exploração de Petróleo Júnior |
Q188671
Geologia
Ao se realizar um levantamento topográfico com um receptor GPS, posiciona-se o receptor entre uma fachada de um edifício e um lago. O sinal será afetado por uma fonte de erro denominada
Ano: 2010
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2010 - Petrobras - Técnico de Exploração de Petróleo Júnior |
Q188670
Engenharia Cartográfica
Por meio das observáveis, os receptores GPS convertem em coordenadas, velocidade e tempo os sinais eletromagnéticos oriundos dos satélites. Consideram-se observáveis básicas do GPS
Ano: 2010
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2010 - Petrobras - Técnico de Exploração de Petróleo Júnior |
Q188669
Engenharia Cartográfica
A posição dos satélites em relação ao receptor é caracterizada pelos fatores DOP(Dilution of Precision). Tais fatores são denominados de acordo com o parâmetro de posicionamento que caracterizam, dentre os quais destacam-se
VDOP:Relativo à altura elipsoidal
HDOP:Relativo à latitude e à longitude elipsoidal
PDOP:Relativo ao posicionamento tridimensional
A imprecisão do posicionamento, em suas várias componentes, cresce com o valor dos correspondentes fatores DOP. Com relação ao PDOP,
VDOP:Relativo à altura elipsoidal
HDOP:Relativo à latitude e à longitude elipsoidal
PDOP:Relativo ao posicionamento tridimensional
A imprecisão do posicionamento, em suas várias componentes, cresce com o valor dos correspondentes fatores DOP. Com relação ao PDOP,
Ano: 2010
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2010 - Petrobras - Técnico de Exploração de Petróleo Júnior |
Q188668
Geologia
Com a utilização da tecnologia GPS, os trabalhos geodésicos e topográficos passaram a ser realizados de forma mais rápida, precisa e econômica. Nesses tipos de trabalho, pelo menos uma estação de coordenadas conhecidas é ocupada simultaneamente a outras com pontos desejados. Se o usuário não puder trabalhar com um par de receptores, para obter as coordenadas dos pontos desejados, ele poderá usar os dados obtidos da(o):
Ano: 2010
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2010 - Petrobras - Técnico de Exploração de Petróleo Júnior |
Q188667
Engenharia Cartográfica
Na década de 70, com o surgimento de novos recursos de hardware e software, tornou-se viável o desenvolvimento de sistemas comerciais, como os primeiros CAD (Projeto Assistido por Computador), que melhoraram em muito as condições para a produção de desenhos e plantas para engenharia e serviram de base para os primeiros sistemas de cartografia automatizada. A despeito do relacionamento entre CAD e SIG, a diferença essencial entre ambos é que o SIG permite
Ano: 2010
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2010 - Petrobras - Técnico de Exploração de Petróleo Júnior |
Q188666
Banco de Dados
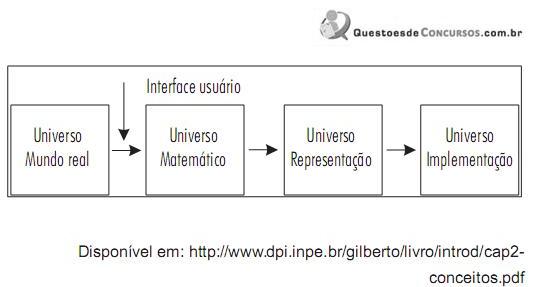
Com base no paradigma dos quatro universos esquematizado na figura acima, em qual deles o modelo de dados é escrito na forma de linguagens de programação e algoritmos?
Ano: 2010
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2010 - Petrobras - Técnico de Exploração de Petróleo Júnior |
Q188665
Banco de Dados
Na estrutura geral de um Sistema de Informações Geográficas (SIG), podem ser indicados os seguintes componentes:
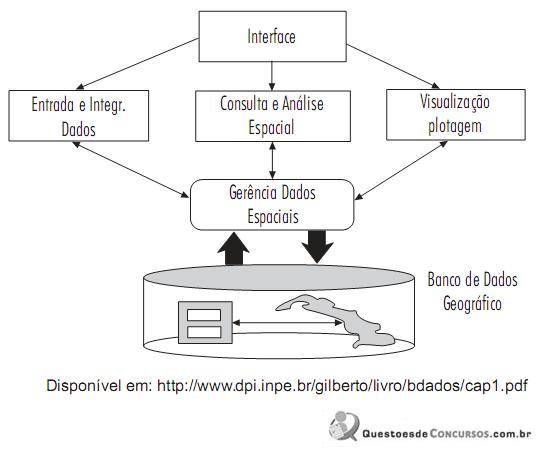
No nível mais interno de um SIG, um Sistema de Gerenciamento de Bancos de Dados Geográfico oferece ao usuário, principalmente, o(a)
No nível mais interno de um SIG, um Sistema de Gerenciamento de Bancos de Dados Geográfico oferece ao usuário, principalmente, o(a)
Ano: 2010
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2010 - Petrobras - Técnico de Exploração de Petróleo Júnior |
Q188664
Engenharia Cartográfica
Considere a figura a seguir:
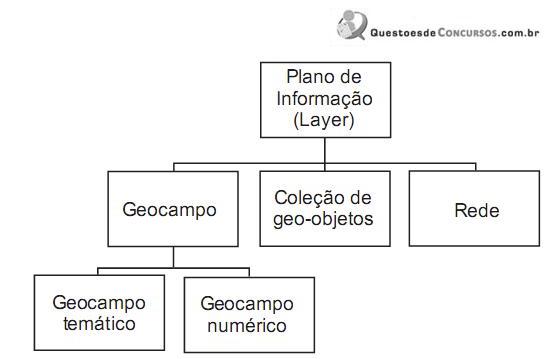
O modelo mostrado acima serve de base para a maioria dos modelos de dados orientados a objetos adotados atualmente em geoinformação. Dentre esses seis conceitos do modelo, aquele que representa um atributo que possui valores em todos os pontos pertencentes a uma região geográfica, sendo uma partição conexa do espaço, é a(o)
O modelo mostrado acima serve de base para a maioria dos modelos de dados orientados a objetos adotados atualmente em geoinformação. Dentre esses seis conceitos do modelo, aquele que representa um atributo que possui valores em todos os pontos pertencentes a uma região geográfica, sendo uma partição conexa do espaço, é a(o)
Ano: 2010
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2010 - Petrobras - Técnico de Exploração de Petróleo Júnior |
Q188663
Meio Ambiente
Uma função polinomial é um dos modelos de transformação geométrica que pode ser usado na primeira etapa de um georreferenciamento. Os parâmetros do modelo polinomial são determinados a partir das coordenadas de pontos homólogos, os quais correspondem a conjuntos de feições de uma base de dados, que também podem ser identificados no sistema de referência. Essas feições são chamadas de pontos de controle. O número de pontos de controle pode ser dado pela regra a seguir.
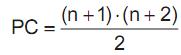 , onde n é o grau do polinômio Assim, se um operador possui 6 pontos de controle para georreferenciar uma imagem, teoricamente, ele pode usar um polinômio de
, onde n é o grau do polinômio Assim, se um operador possui 6 pontos de controle para georreferenciar uma imagem, teoricamente, ele pode usar um polinômio de
, onde n é o grau do polinômio Assim, se um operador possui 6 pontos de controle para georreferenciar uma imagem, teoricamente, ele pode usar um polinômio de
Ano: 2010
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2010 - Petrobras - Técnico de Exploração de Petróleo Júnior |
Q188662
Banco de Dados
Em um Sistema de Gerenciamento de Banco de Dados Espaciais, cada objeto vetorial é codificado usando-se um ou mais pares de coordenadas, o que permite determinar sua localização. Tais objetos vetoriais podem ser descritos através de três entidades geométricas básicas, que são:
Ano: 2010
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2010 - Petrobras - Técnico de Exploração de Petróleo Júnior |
Q188661
Banco de Dados
A dimensão temporal determina as representações de tempo em um banco de dados. Em relação a essa dimensão, um Sistema de Gerenciamento de Banco de Dados pode ter quatro diferentes classificações, conforme tabela a seguir.
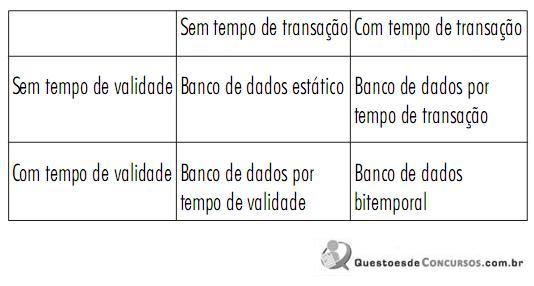
Em uma análise de dados espaço-temporais, a distinção entre tempo de validade e tempo de transação é que
Em uma análise de dados espaço-temporais, a distinção entre tempo de validade e tempo de transação é que
Ano: 2010
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2010 - Petrobras - Técnico de Exploração de Petróleo Júnior |
Q188660
Engenharia Agronômica (Agronomia)
O modelo com triangulação irregular (TIN – Triangulated Irregular Network) representa a superfície do terreno por meio de um conjunto de faces triangulares interconectadas.
Sobre esse modelo, afirma-se que
Sobre esse modelo, afirma-se que
Ano: 2010
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2010 - Petrobras - Técnico de Exploração de Petróleo Júnior |
Q188659
Algoritmos e Estrutura de Dados
Sobre as estruturas de dados matriciais e vetoriais, analise as afirmativas a seguir.
I – Em sua forma mais simples, o modelo de dados matriciais (raster) consiste em uma matriz de células quadradas ou retangulares.
II – Nas estruturas vetoriais, os relacionamentos topológicos são mais difíceis de implementar do que nas estruturas matriciais.
III – O modelo de dados vetoriais consiste de pixels, linhas e polígonos.
Está correto APENAS o que se afirma em
I – Em sua forma mais simples, o modelo de dados matriciais (raster) consiste em uma matriz de células quadradas ou retangulares.
II – Nas estruturas vetoriais, os relacionamentos topológicos são mais difíceis de implementar do que nas estruturas matriciais.
III – O modelo de dados vetoriais consiste de pixels, linhas e polígonos.
Está correto APENAS o que se afirma em