Questões de Concurso
Para mecatrônica
Foram encontradas 97 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
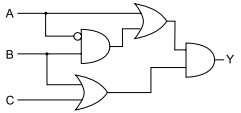
No circuito combinacional a seguir,

onde A, B e F são variáveis booleanas, a expressão correta e simplificada para F é
I. A Unidade de Controle (UC) é utilizada para o sequenciamento das instruções da máquina, gerando os sinais de controle necessários para cada etapa do ciclo de instrução. II. A UC está localizada no chipset de controle de barramento da placa mãe. III. O circuito lógico digital, normalmente utilizado para sua implementação, é o decodificador, que recebe o campo OP ou OpCode da instrução e os codifica em sinais de controle para os outros dispositivos.
Está correto o que se afirma em
Está correto somente o que se afirma em
Procedimento busca (V,N,x) A ← 1 Z ← N Enquanto x não for encontrado se Z < A então retorna x não existe em V. m ← A + (Z - A) / 2 se V[m] < x então A ← m + 1 se V[m] > x então Z ← m - 1 se V[m] = x então retorna x encontrado fim Enquanto fim Procedimento
Assinale a opção que representa a complexidade do algoritmo utilizando a notação Big O.
O sistema descrito pelas seguintes equações de estado
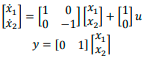
é
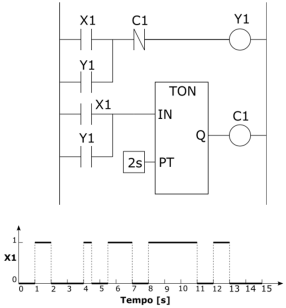
Desprezando-se o tempo de varredura do CLP, o tempo, em segundos, em que Y1 permanece em nível lógico 1 no intervalo de 0 a 15s é
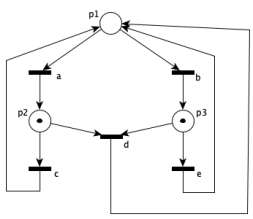
A transição que possui a propriedade de ser não viva é a transição
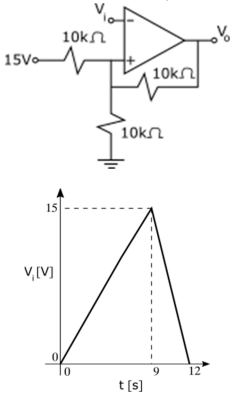
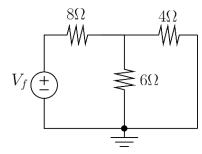
Considerando-se que de 0 a 12 segundos o sinal Vi apresenta a variação indicada na figura e que Vo = 15V em t = 0s, o tempo total, em segundos em que Vo permanece em 0V no intervalo de 0 a 12 segundos é

Sabendo-se que a viga suporta um esforço de compressão e tração máximas acima e abaixo da linha neutra (LN) respectivamente, na situação em que distâncias das bases inferior e superior com a LN forem no máximo iguais a 4 dm.
Assinale a opção que indica a distância da linha neutra da base inferior e a sua resposta aos esforços, respectivamente.
Desprezando-se a indutância da armadura e atritos viscosos norotor, pode-se obter um modelo de primeira ordem para omotor, na forma da função de transferência:
Ω(s)/ V(s) = A/
 + 1
+ 1 em que Ω(s) e V(s) são as transformadas de Laplace davelocidade angular do rotor ω(t) e da tensão da armadura v(t),respectivamente.
Os parâmetros do modelo A ,em rad/s.V , e
 em segundos, são,respectivamente,
em segundos, são,respectivamente, Em uma empresa, foi construído um elevador pneumático para descer cargas da produção. Para isso, um cilindro pneumático foi colocado abaixo de uma plataforma. Uma alavanca é utilizada para comutar uma válvula direcional, que envia ar comprimido para o cilindro, elevando a plataforma. Quando a alavanca retorna para a posição inicial (de repouso), a plataforma desce pela força da gravidade, expulsando o ar do cilindro pneumático.
É correto afirmar que a especificação da válvula direcional para que o sistema funcione adequadamente é:
Analise o seguinte diagrama elétrico.
A expressão booleana simplificada que representa corretamente o diagrama elétrico é: