Questões de Concurso
Para engenharia eletrônica
Foram encontradas 3.812 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
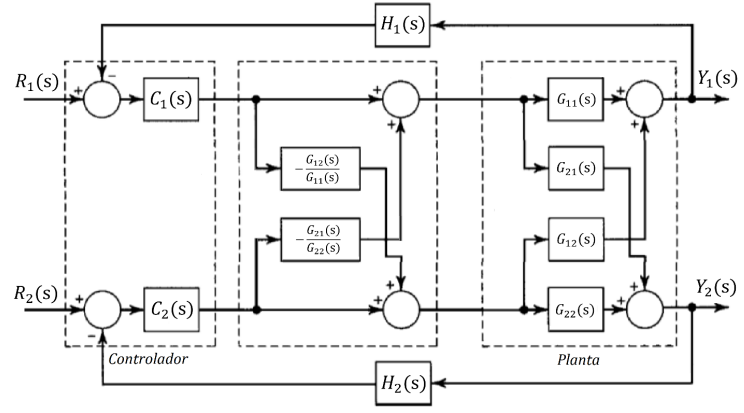
Figura 12
 x ∈ Rn, u ∈ Rm, y ∈ Rp
x ∈ Rn, u ∈ Rm, y ∈ RpSendo x o vetor de estados do sistema acima, um engenheiro propõe uma lei de controle por realimentação de estados do formato u = −K1x + K2r para que a saída y(t) siga uma referência constante r. Dado esse contexto, assinale a alternativa que representa a expressão de K2 dado queK1 é conhecido.
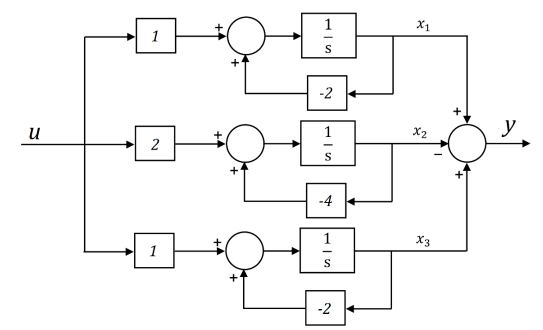
Figura 11
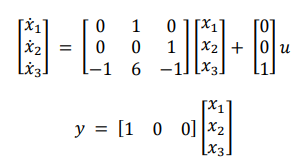
Y(s) / U(s) = 2 / s3 + 6s2 + 11s + 6
Assumindo condições iniciais nulas, assinale a alternativa que corresponde às matrizes do modelo matemático do sistema em sua representação em espaço de estados.
Considere o sistema massa-mola-amortecido (Figura 10) a seguir:
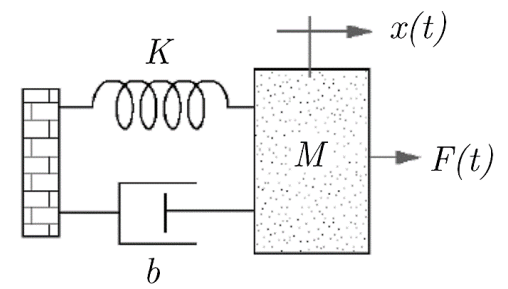
Figura 10
Os sinais de entrada e de saída do sistema são dados por F(t) e x(t), respectivamente. Além disso, definem-se as variáveis de estado como x1(t) = x(t) e x2(t) = ẋ(t). Com base nessas informações, assinale a alternativa que corresponde às matrizes do modelo matemático do sistema em sua representação em espaço de estados.
I. A técnica conhecida para projetar controladores diretamente no domínio do tempo discreto é conhecida como método direto como, por exemplo, o método de Tustin.
II. A técnica conhecida como emulação consiste em obter um equivalente discreto para um controlador contínuo já previamente projetado. Para isso, normalmente se utiliza o método de Euler ou o método do mapeamento de polos e zeros.
III. No projeto por emulação, a frequência de amostragem deve ser pelo menos duas vezes maior que a largura de faixa (ou largura de banda) do sistema em malha fechada a tempo contínuo de forma a atender o teorema da amostragem de Nyquist-Shannon. Caso contrário, ocorrerá o aliasing.
Sendo x = [x1 x2 x3] o vetor de estados do sistema acima, objetiva-se projetar um controlador por realimentação de estados (i.e, u = −Kx) de tal forma a alocar os polos do sistema em malha fechada em -1, -2 e -4. Dado esse contexto, determine o vetor de ganhos K = [K1 K2 K3] necessário para garantir esse requisito.
I. Se e somente se todos os polos estiverem dentro do círculo unitário (centrado na origem do plano Z), o sistema é assintoticamente estável.
II. O sistema é instável se e somente se existirem polos de multiplicidade maior que um sobre o círculo unitário.
III. O sistema é marginalmente instável se polos não repetidos estiverem sobre o círculo unitário e não existirem polos fora do círculo unitário.
Considere o diagrama de blocos da Figura 7 abaixo:
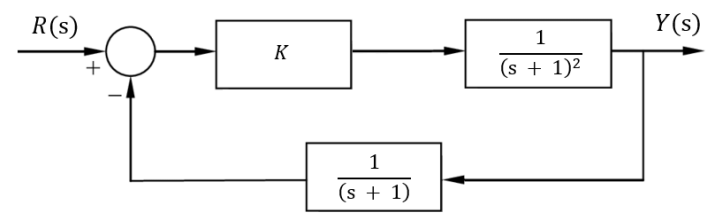
Figura 7
Assinale a alternativa que corresponde ao intervalo de valores de K que garante a estabilidade do
sistema em malha fechada.
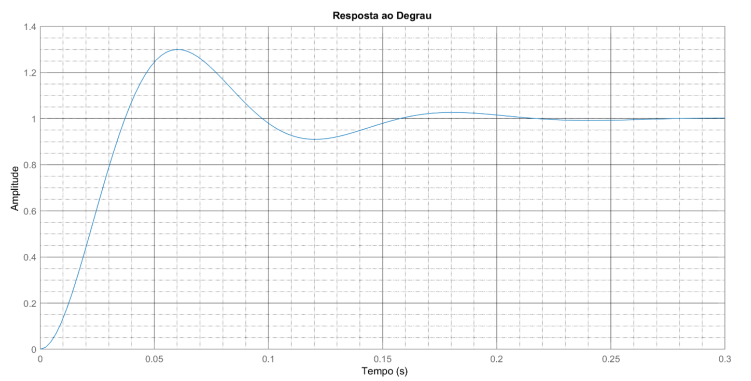
Figura 6
Considere o sistema de controle com retroalimentação unitária mostrado na Figura 5 abaixo:
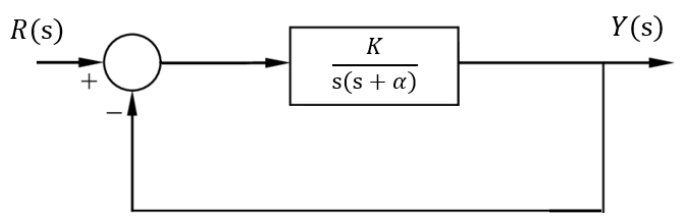
Figura 5
Determine os valores de K e α para os quais a resposta a um degrau unitário é subamortecida
(ζ = 0,5) e apresenta um tempo de 2 segundos para que as oscilações transitórias permaneçam
dentro de uma faixa de 2% em torno do valor final do regime permanente.
C(s) = 2 ( s + 4 / s + 8 )
Analisando a estrutura de C(s), pode-se afirmar que a compensação é do tipo:
I. Os compensadores por atraso de fase ou por avanço de fase são usualmente implementados com estruturas ativas.
II. Os sistemas de controle em malha aberta possuem maior rejeição a perturbações externas do que os sistemas em malha fechada.
III. Há uma melhoria maior no erro de estado estacionário se for usado um controlador Proporcional-Integral (PI) no lugar de um compensador por atraso de fase.
É bem comum projetar sistemas de controle em malha fechada com base na combinação das ações proporcional e integral. De acordo com as características desse controlador, assinale a alternativa correta.
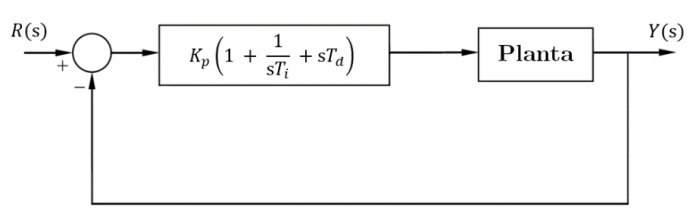
Figura 4
A lei de controle do controlador PID no domínio s, na figura acima, representa a realização do controlador PID na estrutura:
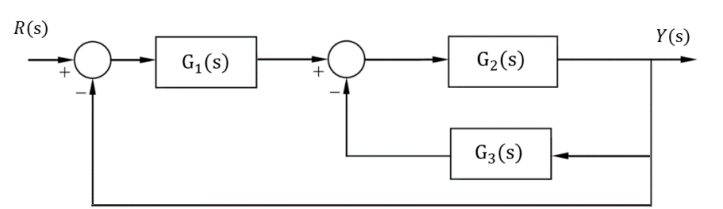
Figura 3
H(s) = ωn2 / s2 + 2ζωns + ωn2
Onde ωn e ζ são denominados de frequência natural e coeficiente de amortecimento, respectivamente. Acerca da natureza da resposta transitória desse sistema, analise as assertivas abaixo e assinale a alternativa correta.
I. O sistema apresenta uma resposta ao degrau unitário subamortecida se 0 < ζ < 1.
II. O sistema apresenta uma resposta ao degrau unitário oscilatória se ζ > 1.
III. Se o sistema possui polos com parte real negativa e iguais, a resposta ao degrau unitário será superamortecida.
I. A Transformada Z é uma generalização da Transformada de Fourier de Tempo Discreto (DTFT).
II. A Transformada Z pode ser considerada como sendo a Transformada de Laplace com a mudança de variável z = esT.
III. A resposta ao impulso unitário de um sistema discreto é igual à sua função de transferência.
Quais estão corretas?
y(K) = 0,3u(K − 1) + 0,3u(K − 2) + 0,9y(K − 1) − 0,2y(K − 2)
Assinale a alternativa que corresponde ao ganho estático (ou ganho DC) desse sistema.