Questões de Concurso Para engenharia eletrônica
Foram encontradas 3.801 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
Ano: 2023
Banca:
CESPE / CEBRASPE
Órgão:
SERPRO
Prova:
CESPE / CEBRASPE - 2023 - SERPRO - Analista - Especialização: Tecnologia |
Q2226548
Engenharia Eletrônica
Aprendizado de máquina é um subcampo da inteligência artificial que consiste no treinamento de modelos computacionais para que possam reconhecer padrões e, a partir de um conjunto de dados de entrada, prever o valor de uma variável de saída. Em relação ao aprendizado de máquina, julgue o item a seguir.
A regressão logística utiliza variáveis independentes categóricas para prever uma variável lógica ou booliana.
A regressão logística utiliza variáveis independentes categóricas para prever uma variável lógica ou booliana.
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Sistemas de Controle |
Q2224299
Engenharia Eletrônica
Usualmente utilizado para sistemas lineares invariantes no tempo e controláveis em sua representação por espaço de estados ẋ(t) = Ax(t) + Bu(t), o regulador linear quadrático (do inglês, Linear Quadratic Regulator) é um controlador ótimo, com base na realimentação de estados, cujos ganhos são obtidos a partir da minimização de uma função custo quadrática do tipo:
J = (xT Qx + uT Ru)dt
(xT Qx + uT Ru)dt
Onde Q é uma matriz real simétrica positiva semidefinida e R é uma matriz real simétrica positiva definida. Para uma realimentação de estados do tipo u = −Kx, a minimização da função custo quadrática acima com J = x(0)TPx(0) é obtida com P > 0, sendo a solução da equação algébrica de Ricatti: ATP + PA − PBR−1BTP + Q = 0. Assinale a alternativa que apresenta a expressão final dos ganhos do controlador, dado que a solução P foi previamente obtida para o caso descrito acima.
J =
(xT Qx + uT Ru)dt Onde Q é uma matriz real simétrica positiva semidefinida e R é uma matriz real simétrica positiva definida. Para uma realimentação de estados do tipo u = −Kx, a minimização da função custo quadrática acima com J = x(0)TPx(0) é obtida com P > 0, sendo a solução da equação algébrica de Ricatti: ATP + PA − PBR−1BTP + Q = 0. Assinale a alternativa que apresenta a expressão final dos ganhos do controlador, dado que a solução P foi previamente obtida para o caso descrito acima.
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Sistemas de Controle |
Q2224298
Engenharia Eletrônica
Assinale a alternativa que corresponde à estratégia de controle multivariável para o
sistema MIMO com duas entradas e duas saídas mostrada na Figura 12 abaixo: 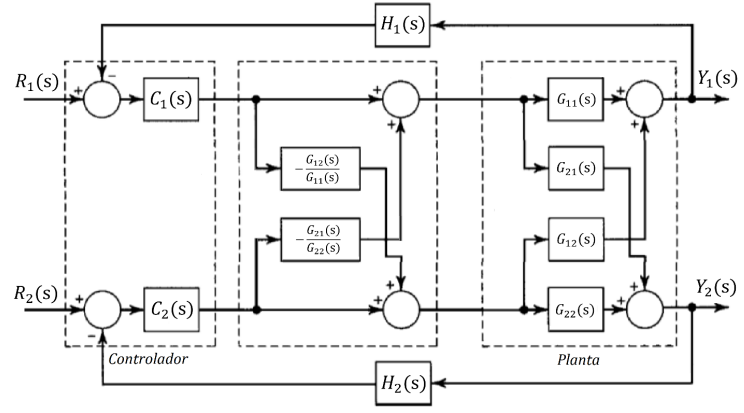
Figura 12
Figura 12
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Sistemas de Controle |
Q2224297
Engenharia Eletrônica
Considere o seguinte modelo em espaço de estados de um sistema linear representado na sua forma matricial:
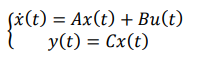 x ∈ Rn, u ∈ Rm, y ∈ Rp
x ∈ Rn, u ∈ Rm, y ∈ Rp
Sendo x o vetor de estados do sistema acima, um engenheiro propõe uma lei de controle por realimentação de estados do formato u = −K1x + K2r para que a saída y(t) siga uma referência constante r. Dado esse contexto, assinale a alternativa que representa a expressão de K2 dado queK1 é conhecido.
x ∈ Rn, u ∈ Rm, y ∈ RpSendo x o vetor de estados do sistema acima, um engenheiro propõe uma lei de controle por realimentação de estados do formato u = −K1x + K2r para que a saída y(t) siga uma referência constante r. Dado esse contexto, assinale a alternativa que representa a expressão de K2 dado queK1 é conhecido.
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Sistemas de Controle |
Q2224296
Engenharia Eletrônica
Assinale a alternativa que corresponde às matrizes associadas à representação em
espaços de estados do sistema mostrado na Figura 11 abaixo: 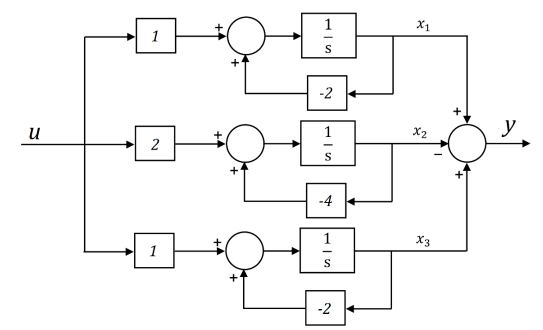
Figura 11
Figura 11