Questões de Concurso
Para engenharia eletrônica
Foram encontradas 3.853 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
A tecnologia de acionamento, de baixo custo, que deve ser escolhida quando se deseja acionar um braço mecânico de precisão que suporta alta intensidade de força é a
Ao medir a temperatura na superfície de seu braço com um termômetro de contato, um operador de caldeira a vapor observa no termômetro o valor de 50ºC, quando se encontra a três metros da caldeira. Pode-se afirmar que, na situação apresentada, a transferência de energia térmica se dá por
Quanto à implantação da automação eletropneumática industrial, é correto afirmar:
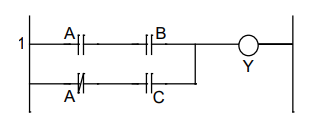
Elaborado pelo(a) autor(a).
Na programação mostrada, uma das possibilidades para que Y seja verdadeiro é
A figura a seguir mostra um contador síncrono de 3 bits.
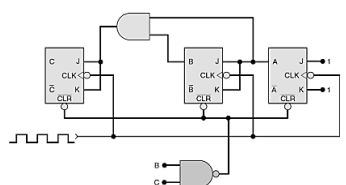
TOCCI, Ronald J. WIDMER, Neal S. MOSS, Gregory L. Sistemas Digitais –
princípios e aplicações. Pearson Prentice-Hall, 10ª edição, 2007. Disponível
em: <
https://ia600808.us.archive.org/1/items/SistemasDigitaisPrincpiosEAplicaaes
10EdRonaldJ.Tocci_201708/Sistemas%20Digitais%20-
%20Princ%C3%ADpios%20e%20Aplica%C3%A7%C3%B5es%20-
%2010%C2%AA%20Ed-Ronald%20J.%20Tocci.pdf>. Acesso em: 25 jun. 2024.
O contador mostrado é de módulo