Questões de Concurso Para engenharia eletrônica
Foram encontradas 3.823 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Sistemas de Controle |
Q2224286
Engenharia Eletrônica
Um tanque de líquido para refrigeração e um controlador/compensador estão em
série em uma malha de controle realimentada. Para controlar o nível do líquido no tanque, o
engenheiro responsável projetou um controlador/compensador, cuja função de transferência, C(s), é
dada por:
C(s) = 2 ( s + 4 / s + 8 )
Analisando a estrutura de C(s), pode-se afirmar que a compensação é do tipo:
C(s) = 2 ( s + 4 / s + 8 )
Analisando a estrutura de C(s), pode-se afirmar que a compensação é do tipo:
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Sistemas de Controle |
Q2224285
Engenharia Eletrônica
Sobre sistemas de controle, analise as assertivas abaixo e assinale a alternativa
correta.
I. Os compensadores por atraso de fase ou por avanço de fase são usualmente implementados com estruturas ativas.
II. Os sistemas de controle em malha aberta possuem maior rejeição a perturbações externas do que os sistemas em malha fechada.
III. Há uma melhoria maior no erro de estado estacionário se for usado um controlador Proporcional-Integral (PI) no lugar de um compensador por atraso de fase.
I. Os compensadores por atraso de fase ou por avanço de fase são usualmente implementados com estruturas ativas.
II. Os sistemas de controle em malha aberta possuem maior rejeição a perturbações externas do que os sistemas em malha fechada.
III. Há uma melhoria maior no erro de estado estacionário se for usado um controlador Proporcional-Integral (PI) no lugar de um compensador por atraso de fase.
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Sistemas de Controle |
Q2224284
Engenharia Eletrônica
Para ajustar os parâmetros de um sistema de controle em malha fechada com
retroalimentação unitária do tipo PID, um engenheiro assumiu inicialmente somente a presença de
uma ação proporcional. Em seguida, ele variou o ganho proporcional de 0 até um valor Kc no qual era
possível observar que a saída atingia uma oscilação sustentada, ou seja, o sistema equivalente tinha
se tornado marginalmente estável. A partir de Kc e do período do sinal de saída, o engenheiro pôde
determinar os parâmetros do PID através de uma tabela. Nesse caso, o método de sintonia do PID
utilizado pelo engenheiro foi o método:
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Sistemas de Controle |
Q2224283
Engenharia Eletrônica
É bem comum projetar sistemas de controle em malha fechada com base na combinação das ações proporcional e integral. De acordo com as características desse controlador, assinale a alternativa correta.
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Sistemas de Controle |
Q2224282
Engenharia Eletrônica
Um sistema de controle em malha fechada do tipo
Proporcional-Integral-Derivativo (PID) com ganho proporcional, Kp , tempo integral, Ti
, e tempo
derivativo, Td , é proposto para uma planta, como pode ser observado no diagrama de blocos
(Figura 4) abaixo: 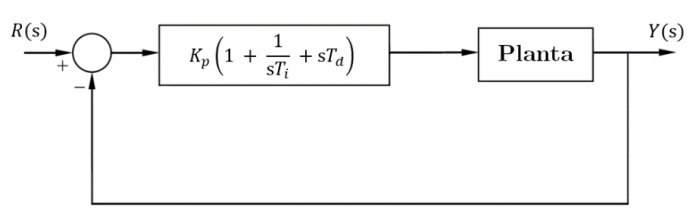
Figura 4
A lei de controle do controlador PID no domínio s, na figura acima, representa a realização do controlador PID na estrutura:
Figura 4
A lei de controle do controlador PID no domínio s, na figura acima, representa a realização do controlador PID na estrutura: