Questões de Concurso
Para cartografia
Foram encontradas 1.164 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
Ano: 2022
Banca:
IADES
Órgão:
ADASA
Prova:
IADES - 2022 - ADASA - Regulador de Serviços Públicos - Gestão e Regulação |
Q1953651
Engenharia Cartográfica
No que tange à cartografia digital e ao sensoriamento remoto,
assinale a alternativa correta.
Ano: 2021
Banca:
IBFC
Órgão:
IAP - PR
Prova:
IBFC - 2021 - IAP - PR - Agente Profissional - Engenheiro Cartógrafo |
Q1931843
Engenharia Cartográfica
Um Sistema de Informação Geográfica (SIG) é
uma ferramenta do Geoprocessamento e
empregada no armazenamento, recuperação,
edição, manipulação, análise, visualização e
distribuição de dados geoespaciais. Em
relação aos componentes de um SIG, analise
as afirmativas abaixo e dê valores Verdadeiro
(V) ou Falso (F).
( ) O SIG é formado por cinco componentes: software, hardware, dados, pessoas e procedimentos.
( ) A Interface de Programação de Aplicativos (API) oferece funções de SIG para aplicações de terceiros.
( ) Um cliente que oferece pouco mais que o acesso a um navegador de Internet, para uso de funções de SIG, é considerado uma instância de cliente leve.
( ) O gerenciamento de um SIG estabelece procedimentos, pontos de controle, linhas de comunicação e outros mecanismos para assegurar a atividade do SIG.
( ) O SIG é uma representação digital de aspectos selecionados de alguma área específica da superfície da Terra, construído para servir na resolução de problemas ou para fins científicos.
Assinale a alternativa que apresenta a sequência correta de cima para baixo.
( ) O SIG é formado por cinco componentes: software, hardware, dados, pessoas e procedimentos.
( ) A Interface de Programação de Aplicativos (API) oferece funções de SIG para aplicações de terceiros.
( ) Um cliente que oferece pouco mais que o acesso a um navegador de Internet, para uso de funções de SIG, é considerado uma instância de cliente leve.
( ) O gerenciamento de um SIG estabelece procedimentos, pontos de controle, linhas de comunicação e outros mecanismos para assegurar a atividade do SIG.
( ) O SIG é uma representação digital de aspectos selecionados de alguma área específica da superfície da Terra, construído para servir na resolução de problemas ou para fins científicos.
Assinale a alternativa que apresenta a sequência correta de cima para baixo.
Ano: 2021
Banca:
IBFC
Órgão:
IAP - PR
Prova:
IBFC - 2021 - IAP - PR - Agente Profissional - Engenheiro Cartógrafo |
Q1931831
Engenharia Cartográfica
Para a construção de uma planta topográfica
impressa, na escala de 1:10.000, deve-se
considerar a menor grandeza gráfica possível
de ser distinguida a olho nú (erro de
graficismo), cujo valor será de ___ m (metros).
Assinale a alternativa que preencha
corretamente a lacuna.
Ano: 2021
Banca:
IBFC
Órgão:
IAP - PR
Prova:
IBFC - 2021 - IAP - PR - Agente Profissional - Engenheiro Cartógrafo |
Q1931829
Engenharia Cartográfica
Para a determinação da forma e dimensões da
Terra, a Geodésia Física emprega vários tipos
de altitudes que possuem características
distintas. Analise as afirmativas abaixo e dê
valores Verdadeiro (V) ou Falso (F).
( ) A altitude de Vignal é aproximação da altitude ortométrica.
( ) A altitude de Helmert não é aproximação da altitude ortométrica.
( ) A altitude dinâmica caracteriza todos os pontos de uma superfície equipotencial e tem uma natureza geométrica.
( ) A altitude de Molodenski é a distância teluróideelipsóide.
( ) As altitudes científicas não são obtidas separadamente da latitude e da longitude.
Assinale a alternativa que apresenta a sequência correta de cima para baixo.
( ) A altitude de Vignal é aproximação da altitude ortométrica.
( ) A altitude de Helmert não é aproximação da altitude ortométrica.
( ) A altitude dinâmica caracteriza todos os pontos de uma superfície equipotencial e tem uma natureza geométrica.
( ) A altitude de Molodenski é a distância teluróideelipsóide.
( ) As altitudes científicas não são obtidas separadamente da latitude e da longitude.
Assinale a alternativa que apresenta a sequência correta de cima para baixo.
Ano: 2022
Banca:
UNIOESTE
Órgão:
Prefeitura de Santo Antônio da Platina - PR
Prova:
UNIOESTE - 2022 - Prefeitura de Santo Antônio da Platina - PR - Desenhista Projetista |
Q1908314
Engenharia Cartográfica
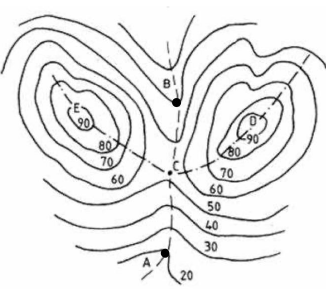
Considere a figura a seguir, retirada de um levantamento planialtimétrico na região de Cascavel, oeste do Paraná. Considerando que as medidas apresentadas estão em metro, assinale a alternativa que corresponde à diferença de nível entre o ponto A e o ponto B.
Ano: 2021
Banca:
CESPE / CEBRASPE
Órgão:
ADAPAR
Prova:
CESPE / CEBRASPE - 2021 - ADAPAR - Fiscal de Defesa Agropecuária - Médico Veterinário |
Q1903906
Engenharia Cartográfica
Texto associado
Situação hipotética 1A6-I
Um agente de defesa agropecuária recebeu um mapa de
localização de propriedades em determinado município com
ocorrência de febre aftosa, para efetuar inspeção de campo.
O referido mapa foi confeccionado no Sistema de Projeção
Universal Transversa de Mercator (UTM), em escala de 1:25.000.
Ainda com relação à situação hipotética 1A6-I, é correto afirmar
que Sistema de Projeção UTM
Ano: 2021
Banca:
CESPE / CEBRASPE
Órgão:
ADAPAR
Prova:
CESPE / CEBRASPE - 2021 - ADAPAR - Fiscal de Defesa Agropecuária - Médico Veterinário |
Q1903905
Engenharia Cartográfica
Texto associado
Situação hipotética 1A6-I
Um agente de defesa agropecuária recebeu um mapa de
localização de propriedades em determinado município com
ocorrência de febre aftosa, para efetuar inspeção de campo.
O referido mapa foi confeccionado no Sistema de Projeção
Universal Transversa de Mercator (UTM), em escala de 1:25.000.
A partir da situação hipotética 1A6-I, é correto afirmar que, se duas
propriedades estiverem separadas uma da outra por um quilômetro,
então elas estarão separadas, no referido mapa de localização, por
uma distância de
Ano: 2021
Banca:
IBFC
Órgão:
SEAP-PR
Prova:
IBFC - 2021 - SEAP-PR - Agente Profissional - Engenheiro Cartógrafo |
Q1788761
Engenharia Cartográfica
Na modelagem de dados geográficos, a
validação de dados testa a integridade _____
de um conjunto de dados e avalia sua
adequação para análise geográfica.
Assinale a alternativa que preencha
corretamente a lacuna.
Ano: 2021
Banca:
IBFC
Órgão:
SEAP-PR
Prova:
IBFC - 2021 - SEAP-PR - Agente Profissional - Engenheiro Cartógrafo |
Q1788760
Engenharia Cartográfica
Para a representação digital de feições
geográficas em um SIG, são utilizados dois
tipos de dados: matriciais e vetoriais. Assinale
a alternativa incorreta.
Ano: 2021
Banca:
IBFC
Órgão:
SEAP-PR
Prova:
IBFC - 2021 - SEAP-PR - Agente Profissional - Engenheiro Cartógrafo |
Q1788758
Engenharia Cartográfica
As projeções cartográficas podem ser
classificadas de acordo com diversos tipos de
características: propriedades, superfície de
projeção e método de traçado. Em relação ao
método de traçado, analise as afirmativas
abaixo e dê valores Verdadeiro (V) ou Falso (F).
( ) Podem ser classificadas em geométricas, analíticas e convencionais. ( ) As projeções geométricas podem ser subdivididas em perspectivas ou pseudoperspectivas. ( ) Em relação à posição do ponto de vista, podem ser subdivididas em ortográficas, estereográficas e gnomônicas. ( ) O ponto de vista da projeção estereográfica está situada no centro da Terra. ( ) O ponto de vista da projeção gnomônica está localizada no infinito.
Assinale a alternativa que apresenta a sequência correta de cima para baixo.
( ) Podem ser classificadas em geométricas, analíticas e convencionais. ( ) As projeções geométricas podem ser subdivididas em perspectivas ou pseudoperspectivas. ( ) Em relação à posição do ponto de vista, podem ser subdivididas em ortográficas, estereográficas e gnomônicas. ( ) O ponto de vista da projeção estereográfica está situada no centro da Terra. ( ) O ponto de vista da projeção gnomônica está localizada no infinito.
Assinale a alternativa que apresenta a sequência correta de cima para baixo.
Ano: 2021
Banca:
IBFC
Órgão:
SEAP-PR
Prova:
IBFC - 2021 - SEAP-PR - Agente Profissional - Engenheiro Cartógrafo |
Q1788757
Engenharia Cartográfica
A projeção _____ equidistante é empregada
em: construção de cartas polares; navegação
aérea e marítima; definição da orientação de
antenas de telecomunicações.
Assinale a alternativa que preencha corretamente a lacuna.
Assinale a alternativa que preencha corretamente a lacuna.
Ano: 2021
Banca:
IBFC
Órgão:
SEAP-PR
Prova:
IBFC - 2021 - SEAP-PR - Agente Profissional - Engenheiro Cartógrafo |
Q1788756
Engenharia Cartográfica
É possível realizar uma transformação entre
diferentes sistemas de coordenadas, tendo-se
algumas coordenadas conhecidas nos dois
sistemas (pontos homólogos). Sobre as
transformações de coordenadas, assinale a
alternativa correta.
Ano: 2021
Banca:
IBFC
Órgão:
SEAP-PR
Prova:
IBFC - 2021 - SEAP-PR - Agente Profissional - Engenheiro Cartógrafo |
Q1788755
Engenharia Cartográfica
O sensoriamento remoto da água pode ser
realizado em seu estado líquido, sólido (gelo) e
gasoso (nuvem). Especificamente, no estado
líquido, é possível se obter importantes
variáveis hidrológicas. Sobre estas variáveis
hidrológicas, assinale a alternativa incorreta.
Ano: 2021
Banca:
IBFC
Órgão:
SEAP-PR
Prova:
IBFC - 2021 - SEAP-PR - Agente Profissional - Engenheiro Cartógrafo |
Q1788754
Engenharia Cartográfica
Um sensor hiperespectral de sensoriamento
remoto captura dados em mais de uma centena
de bandas espectrais, e, normalmente, com um
estreito espaçamento entre as bandas
coletadas. Analise as afirmativas abaixo e dê
valores Verdadeiro (V) ou Falso (F).
( ) São exemplos de sensores hiperespectrais: AVIRIS, Hyperion e ASTER. ( ) Não são usadas matrizes lineares de detectores para a geração de imagens hiperespectrais. ( ) Cada pixel do cubo de imagens permite recuperar a informação espectral em um espectro discreto. ( ) Nos sensores hiperespectrais são usadas grades de refração que dispersam a radiação eletromagnética. ( ) O sensor hiperespectral emprega grades de refração em substituição aos espelhos.
Assinale a alternativa que apresenta a sequência correta de cima para baixo.
( ) São exemplos de sensores hiperespectrais: AVIRIS, Hyperion e ASTER. ( ) Não são usadas matrizes lineares de detectores para a geração de imagens hiperespectrais. ( ) Cada pixel do cubo de imagens permite recuperar a informação espectral em um espectro discreto. ( ) Nos sensores hiperespectrais são usadas grades de refração que dispersam a radiação eletromagnética. ( ) O sensor hiperespectral emprega grades de refração em substituição aos espelhos.
Assinale a alternativa que apresenta a sequência correta de cima para baixo.
Ano: 2021
Banca:
IBFC
Órgão:
SEAP-PR
Prova:
IBFC - 2021 - SEAP-PR - Agente Profissional - Engenheiro Cartógrafo |
Q1788753
Engenharia Cartográfica
A _____ é a grandeza geométrica mais utilizada
para caracterizar as interações energia-matéria
na região infravermelha e visível do espectro
eletromagnético.
Assinale a alternativa que preencha
corretamente a lacuna.
Ano: 2021
Banca:
IBFC
Órgão:
SEAP-PR
Prova:
IBFC - 2021 - SEAP-PR - Agente Profissional - Engenheiro Cartógrafo |
Q1788751
Engenharia Cartográfica
O método paramétrico ou método dos
parâmetros é também denominado
ajustamento de observações indiretas, pois
procura-se estimar grandezas que se vinculam
aos valores observados. Sobre este método,
assinale a alternativa incorreta.
Ano: 2021
Banca:
IBFC
Órgão:
SEAP-PR
Prova:
IBFC - 2021 - SEAP-PR - Agente Profissional - Engenheiro Cartógrafo |
Q1788750
Engenharia Cartográfica
Na aplicação do método dos mínimos
quadrados, a equação matricial que representa
o conjunto das n equações normais a u
incógnitas, quando a matriz ATA é não singular
(e considerando P = I) é dada por:
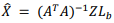
Em relação ao elemento Z, assinale a alternativa correta.
Em relação ao elemento Z, assinale a alternativa correta.
Ano: 2021
Banca:
IBFC
Órgão:
SEAP-PR
Prova:
IBFC - 2021 - SEAP-PR - Agente Profissional - Engenheiro Cartógrafo |
Q1788749
Engenharia Cartográfica
A poligonação é um método topográfico
amplamente utilizado no Brasil. Uma poligonal
é constituída por uma sequência de linhas
conectadas (lados), estabelecendo vértices
com coordenadas conhecidas ao longo de seu
caminhamento. Analise as afirmativas abaixo e
dê valores Verdadeiro (V) ou Falso (F).
( ) A direção de pelo menos um lado deve ser conhecida ou pelo menos arbitrada. ( ) A sequência do cálculo da poligonal fechada é: verificação do erro de fechamento angular, distribuição do erro de fechamento angular, verificação do erro de fechamento linear, distribuição do erro de fechamento linear, cálculo das coordenadas parciais, cálculo das coordenadas totais, cálculo da área. ( ) Possibilita menos trabalho de reconhecimento de campo, pois necessita apenas do caminhamento sobre o terreno. ( ) A poligonal fechada não permite eliminar os erros sistemáticos da medição das distâncias. ( ) A poligonal topograficamente apoiada, sob o ponto de vista topográfico é considerada uma poligonal aberta.
Assinale a alternativa que apresenta a sequência correta de cima para baixo.
( ) A direção de pelo menos um lado deve ser conhecida ou pelo menos arbitrada. ( ) A sequência do cálculo da poligonal fechada é: verificação do erro de fechamento angular, distribuição do erro de fechamento angular, verificação do erro de fechamento linear, distribuição do erro de fechamento linear, cálculo das coordenadas parciais, cálculo das coordenadas totais, cálculo da área. ( ) Possibilita menos trabalho de reconhecimento de campo, pois necessita apenas do caminhamento sobre o terreno. ( ) A poligonal fechada não permite eliminar os erros sistemáticos da medição das distâncias. ( ) A poligonal topograficamente apoiada, sob o ponto de vista topográfico é considerada uma poligonal aberta.
Assinale a alternativa que apresenta a sequência correta de cima para baixo.
Ano: 2021
Banca:
IBFC
Órgão:
SEAP-PR
Prova:
IBFC - 2021 - SEAP-PR - Agente Profissional - Engenheiro Cartógrafo |
Q1788748
Engenharia Cartográfica
Para a determinação da cota de um
determinado alvo (ponto B), uma equipe de
topografia executou um nivelamento
geométrico de um trecho único com extensão
de 500 m (metros), a partir de uma referência
de nível (ponto A) e, em seguida, um
contranivelamento. Considerando-se que a
diferença de nível medida na ida foi de 15,008
m (metros) e na volta de 15,006 m (metros),
calcule a precisão do nivelamento (em
milímetros) e assinale a alternativa correta.
Ano: 2021
Banca:
IBFC
Órgão:
SEAP-PR
Prova:
IBFC - 2021 - SEAP-PR - Agente Profissional - Engenheiro Cartógrafo |
Q1788746
Engenharia Cartográfica
O Posicionamento por Ponto Preciso (PPP) é
um método que tem se desenvolvido muito nos
últimos anos, permitindo-se atingir alta
acurácia com apenas um receptor e
requerendo o uso das correções dos relógios
dos satélites e suas efemérides. Sobre o PPP,
assinale a alternativa incorreta.