Questões Militares
Sobre controladores em engenharia de automação
Foram encontradas 15 questões
Analise as afirmativas a seguir a respeito dos controladores PID.
I - As regras de sintonia de Ziegler Nichols não são convenientes quando o modelo matemático do sistema é desconhecido .
II - Os controladores PID propiciam controle satisfatório para processos contínuos, porém podem não fornecer o controle ótimo em muitas situações específicas.
III- Os controladores PID não podem ser dotados de capacidade de sintonia automática (on line) .
Assinale a opção correta
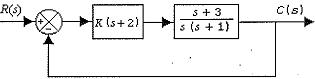
Para a construção do lugar das raízes do sistema acima é preciso calcular os pontos de partida e de chegada. Assinale a opção que apresenta aproximadamente o valor do ganho K nos pontos de partida e de chegada, respectivamente.
Leia a afirmação abaixo e assinale a alternativa que preenche as lacunas correta e respectivamente.
A teoria de controle moderno contrasta com a teoria de controle convencional porque a primeira é
aplicada a sistemas de entrada(s) e saída(s) ______________, que _______________, enquanto que a
última é aplicável a sistemas _______________, de entrada(s) e saída(s) _______________.
Considerando o sistema de controle a seguir, em que ζ = 0,8 e ωn = 2rad/s, analise as afirmações abaixo, marque V para verdadeiro e F para falso e, em seguida, assinale a alternativa que apresenta a sequência correta. (Considerar π = 3,14).
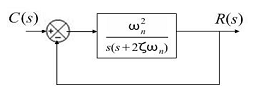
( ) Tempo de atraso é o tempo requerido para que a resposta alcance metade de seu valor final pela primeira vez.
( ) O tempo de pico é de aproximadamente 0,8 segundos.
( ) O tempo de acomodação para o critério de 5% é de aproximadamente 1,8 segundos.
( ) Tempo de subida é o tempo para que a resposta atinja o primeiro pico de sobressinal.
Analise o sistema mostrado na figura a seguir.
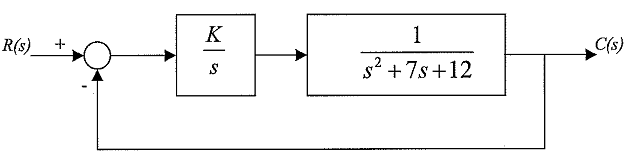
De acordo com o sistema acima, o intervalo de valores
no eixo real negativo do plano s, que não pertence ao
lugar das raízes deste sistema, está entre:
Assinale a opção que completa corretamente as lacunas da sentença abaixo:
"Para calcular a margem de fase é necessário determinar a frequência correspondente ao ponto de ganho crítico, do diagrama de bode do módulo, no qual o módulo é igual a ________. Para calcular a margem de ganho é necessário determinar a frequência correspondente ao ponto de fase crítica, do diagrama de bode de fase, no qual a fase é igual a _________ ."