Questões Militares
Sobre posicionamento espacial em engenharia cartográfica
Foram encontradas 39 questões
I. geodinâmica.
II. navegação global e regional.
III. estabelecimento de redes geodésicas locais, regionais, continentais e globais (ativas e passivas).
IV. levantamentos geodésicos para fins de mapeamento, apoio fotogramétrico e controle de deformações.
V. determinação altimétrica.
Estão corretas as atividades
Correlacione o sistema de posicionamento GPS às suas respectivas fontes de erros, e assinale a opção que apresenta a sequência correta.
SISTEMA DE POSICIONAMENTO GPS
I - Satélite
II - Propagação do Sinal
III- Receptor / Antena
IV - Estação
( ) Refração troposférica e Refração ionosférica ( ) Erro nas coordenadas e Marés terrestres ( ) Erro da órbita e Relatividade ( ) Erro do relógio e Centro de fase ( ) Muiticaminhamento e Rotação da Terra
Analise as afirmativas abaixo, em relação aos métodos de posicionamento GNSS, e assinale a opção correta.
I - Se as coordenadas foram obtidas diretamente em relação a um referencial geocêntrico, diz-se que foi obtida por métodos absolutos.
II - Se as coordenadas foram obtidas diretamente em relação a uma estação de referência cujas coordenadas são conhecidas, diz-se que foi obtida por método relativo.
III- Se o objeto, no qual a antena esta acoplada, encontra-se em movimento e as posições são obtidas em relação a uma estação de terra, diz-se que as coordenadas foram obtidas por método absoluto cinemático.
IV - Se o objeto, no qual onde a antena está acoplada, encontra-se em movimento e as posições são obtidas em relação a uma estação de terra, diz-se que as coordenadas foram obtidas por método relativo estático.
( ) Embora tenha sido desenvolvido para fins militares, apresenta enorme benefício para outros grupos, como organizações governamentais e grupos privados de levantamento.
( ) Diversos receptores são capazes de rastrear satélites do Sistema Global de Navegação por Satélite (GNSS).
( ) Pode ser muito útil nas medições cruzando propriedades nas quais os proprietários não permitem o acesso.
( ) Foi desenvolvido para compor o sistema GLONASS.
Correlacione os Sinais GPS as suas características, e assinale a opção que apresenta a sequência correta.
SINAL GPS
I - Mensagem de navegação
II - Portadora L1
III- Portadora L2
IV - Disponibilidade seletiva
CARACTERÍSTICAS
( ) Modulado pelo código P (ou Y) .
( ) Fonte de erro que afeta o sistema GPS.
( ) Contém todos os dados orbitais necessários ao cálculo da posição do satélite no instante da observação pelo receptor.
( ) Modulado pelo código C/A e pelo código P.
( ) Transmitida na frequência
1575,42Hz.
Analise a figura a seguir.
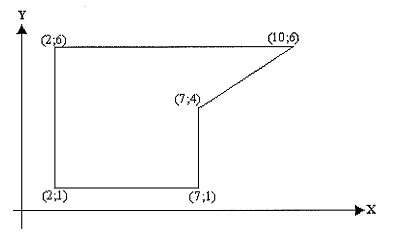
Determine a área da figura mostrada acima, cujas coordenadas
estão em metros, e assinale a opção correta.
Em relação ao Sistema de Posicionamento Global (GPS), analise as afirmativas abaixo e assinale a opção correta.
I - O uso de duas frequências, ambas múltiplas de uma frequência fundamental, permite que perturbações na propagação do sinal GPS, tais como os efeitos de refração introduzidos pela ionosfera, possam ser determinados.
II - Todos os satélites GPS transmitem nas mesmas frequências, e com a mesma modulação, sob a forma de código, que permite a perfeita identificação dos satélites pelo receptor GPS.
III- Os satélites completam uma volta ao redor da Terra com um período aproximado de 12 horas, portanto o mesmo satélite é observado por uma estação em terra duas vezes ao dia.
Assinale a opção que completa corretamente as lacunas da sentença abaixo.
No Sistema UTM (Universal Transversa de Mercator), no caso do cilindro secante, é atribuído um fator de escala de _________ ao meridiano central. A cada fuso, é associado um sistema cartesiano métrico de referência, atribuindo à origem (interseção da linha de Equador com o meridiano central) as seguintes coordenadas: ____________ metros, para contagem de coordenadas ao longo do Equador (eixo X), e _______________ metros, para contagem de coordenadas ao longo do meridiano central (eixo Y).
Assinale a alternativa que apresenta, respectivamente, os parâmetros de I a IV presentes na equação abaixo.