Questões de Concurso Militar Quadro Complementar 2011 para Segundo-Tenente - Engenharia, Controle e Automação
Foram encontradas 49 questões
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251519
Engenharia de Automação
Analise o circuito a seguir.
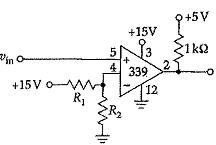
No circuito comparador da figura acima, qual a tensão de referência, considerando R1 = 20kΩ e R2 = 4kΩ?
No circuito comparador da figura acima, qual a tensão de referência, considerando R1 = 20kΩ e R2 = 4kΩ?
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251520
Engenharia de Automação
Assinale a opção que NÃO apresenta uma vantagem de um sistema de controle em malha aberta.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251521
Engenharia de Automação
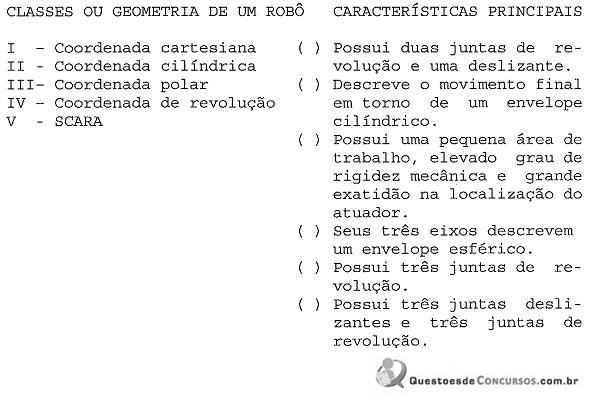
Correlacione as classes ou geometria de um robô às suas características principais e assina1e a opção correta.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251522
Engenharia de Automação
Considere o sistema mecânico apresentado a seguir.

Onde:
m = massa do bloco
k = constante da mola
Supondo-se que o sistema acima esteja inicialmente em repouso {x(0)= 0, x(0)= 0] e que, no instante t= 0, o sistema seja posto em movimento através de um impulso unitário de força, assinale a opção que apresenta a resposta deste sistema em função do tempo (Y (t) ) , quando submetido ao impulso unitário de força.
Onde:
m = massa do bloco
k = constante da mola
Supondo-se que o sistema acima esteja inicialmente em repouso {x(0)= 0, x(0)= 0] e que, no instante t= 0, o sistema seja posto em movimento através de um impulso unitário de força, assinale a opção que apresenta a resposta deste sistema em função do tempo (Y (t) ) , quando submetido ao impulso unitário de força.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251523
Engenharia de Automação
Um sensor óptico é empregado em um robô industrial com o objetivo de detectar
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251524
Engenharia de Automação
Assina1e a opção que NÃO corresponde a um elemento constituinte da arquitetura de um controlador lógico programável.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251525
Engenharia de Automação
Considere o sistema de controle apresentado a seguir.
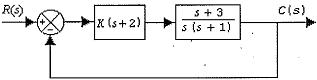
Para a construção do lugar das raízes do sistema acima é preciso calcular os pontos de partida e de chegada. Assinale a opção que apresenta aproximadamente, e respectivamente, os pontos de partida e de chegada desse sistema.
Para a construção do lugar das raízes do sistema acima é preciso calcular os pontos de partida e de chegada. Assinale a opção que apresenta aproximadamente, e respectivamente, os pontos de partida e de chegada desse sistema.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251527
Engenharia de Automação
Analise o circuito a seguir.
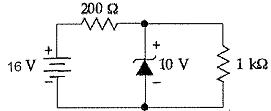
No circuito acima, qual a corrente no resistor de 1kΩ , considerando o diodo zener ideal?
No circuito acima, qual a corrente no resistor de 1kΩ , considerando o diodo zener ideal?
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251528
Engenharia de Automação
Analise o circuito a seguir.
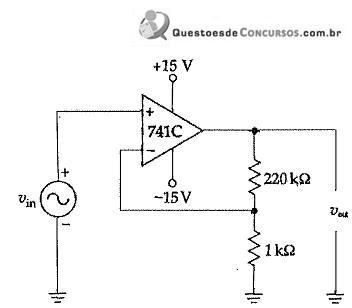
Qual o ganho de tensão do circuito acima?
Qual o ganho de tensão do circuito acima?
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251529
Engenharia de Automação
Coloque F (falso) ou V (verdadeiro) nas afirmativas abaixo, em relação à seleção de robôs industriais, assinalando a seguir a opção correta.
( ) A flexibilidade é um dos objetivos de um projeto de robotização.
( ) Dentre as três estratégias básicas de fabricação - manual, sistemas flexíveis e automação rígida -, somente o custo unitário de cada estratégia deve ser considerado na escolha da mais adequada.
( ) A especificação do método de programação é uma consideração técnica que deve ser analisada por ocasião da escolha do robô.
( ) Na análise de viabilidade econômica de um projeto de robotização, deve-se considerar que um robô não proporciona flexibilidade para atender às mudanças de mercado.
( ) O melhor arranjo físico para um robô industrial considera apenas as distâncias dos movimentos relacionados ao cumprimento da tarefa.
( ) A flexibilidade é um dos objetivos de um projeto de robotização.
( ) Dentre as três estratégias básicas de fabricação - manual, sistemas flexíveis e automação rígida -, somente o custo unitário de cada estratégia deve ser considerado na escolha da mais adequada.
( ) A especificação do método de programação é uma consideração técnica que deve ser analisada por ocasião da escolha do robô.
( ) Na análise de viabilidade econômica de um projeto de robotização, deve-se considerar que um robô não proporciona flexibilidade para atender às mudanças de mercado.
( ) O melhor arranjo físico para um robô industrial considera apenas as distâncias dos movimentos relacionados ao cumprimento da tarefa.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251530
Engenharia de Automação
O resultado da conversão do número 23 na base 10 para a base 2 é:
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251531
Engenharia de Automação
Calculef(3x+ 3)dx e assinale a opção que apresenta a resposta correta.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251532
Engenharia de Automação
Analise o circuito a seguir.

Qual o valor de Vce no circuito representado pela figura acima, considerando que RC = 1000Ω, Vcc = 10V e a corrente no coletor Ic = 1mA?
Qual o valor de Vce no circuito representado pela figura acima, considerando que RC = 1000Ω, Vcc = 10V e a corrente no coletor Ic = 1mA?
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251533
Engenharia de Automação
Analise a figura a seguir.

Que expressão representa a tabela acima?
Que expressão representa a tabela acima?
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251534
Engenharia de Automação
Considere o oscilador tipo pêndulo de massa M e comprimento L apresentado a seguir.

Assinale a opção que apresenta uma aproximação linear do torque T, em função do ângulo θ, em torno do ponto de equilíbrio (θ= 0) , razoavelmente precisa para -π/4≤θ≤π/ 4.
Assinale a opção que apresenta uma aproximação linear do torque T, em função do ângulo θ, em torno do ponto de equilíbrio (θ= 0) , razoavelmente precisa para -π/4≤θ≤π/ 4.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251535
Engenharia de Automação
Analise a figura a seguir.
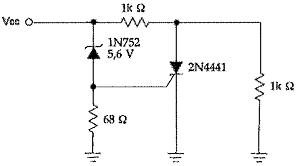
Na figura acima o 2N4441 tem uma tensão de disparo igual a 0,75V. Qual a tensão de alimentação Vcc necessária para que o SCR seja disparado?
Na figura acima o 2N4441 tem uma tensão de disparo igual a 0,75V. Qual a tensão de alimentação Vcc necessária para que o SCR seja disparado?
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251536
Engenharia de Automação
Considere o sistema de controle apresentado a seguir.
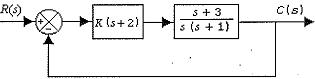
Para a construção do lugar das raízes do sistema acima é preciso calcular os pontos de partida e de chegada. Assinale a opção que apresenta aproximadamente o valor do ganho K nos pontos de partida e de chegada, respectivamente.
Para a construção do lugar das raízes do sistema acima é preciso calcular os pontos de partida e de chegada. Assinale a opção que apresenta aproximadamente o valor do ganho K nos pontos de partida e de chegada, respectivamente.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251537
Engenharia de Automação
Com relação à linguagem de diagrama de contatos ou linguagem LADDER, assinale a opção que apresenta a instrução disponível em qualquer tipo de controlador lógico programável.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251538
Engenharia de Automação
Em relação aos conceitos de controbabilidade e observalidade, assinale a opção correta.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251539
Engenharia de Automação
Considere a equação diferencial apresentada a seguir.

Submetendo a equação às seguintes condições iniciais: x(0) = a e x = b , e sendo a e b constantes, assinale a opção que apresenta o resultado x(t) para o cálculo desta equação diferencial para t 0.
Submetendo a equação às seguintes condições iniciais: x(0) = a e x = b , e sendo a e b constantes, assinale a opção que apresenta o resultado x(t) para o cálculo desta equação diferencial para t 0.