Questões Militares
Para cartografia
Foram encontradas 533 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
Ano: 2022
Banca:
Aeronáutica
Órgão:
CIAAR
Prova:
Aeronáutica - 2022 - CIAAR - Primeiro Tenente - Engenharia Cartográfica |
Q1991517
Engenharia Cartográfica
Para levantamento cadastral ou topográficos em geral, uma das tecnologias atuais, e com um bom custo-benefício
são as imagens fotogramétricas tomadas de baixas alturas de voo com uso de Veículos Aéreos Não Tripulados
(VANTs). No levantamento de uma determinada região para planejamento e projeto de construção de um aeródromo,
com relevo pouco acidentado, foram coletadas imagens com sobreposições frontais igual a 70%, conforme figura 2.
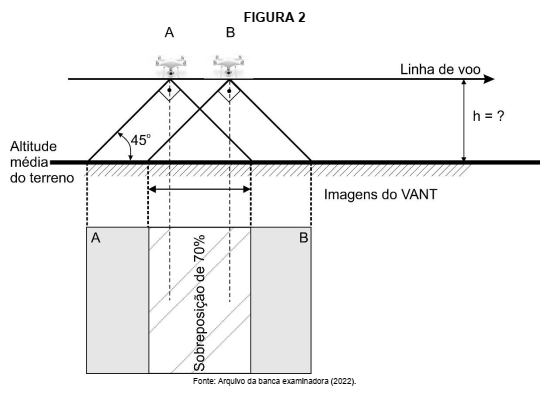
Ainda nesse voo, configurou-se o VANT com intervalo de tempo para adquirir duas imagens consecutivas igual a 3 segundos, sendo a velocidade de tomada das imagens igual a 36 km/h. A abertura de tomada da câmera desse modelo é de 90º .
De posse destes dados, a altura de voo (h) que deve ser fixada, em metros, é igual a
Ainda nesse voo, configurou-se o VANT com intervalo de tempo para adquirir duas imagens consecutivas igual a 3 segundos, sendo a velocidade de tomada das imagens igual a 36 km/h. A abertura de tomada da câmera desse modelo é de 90º .
De posse destes dados, a altura de voo (h) que deve ser fixada, em metros, é igual a
Ano: 2022
Banca:
Aeronáutica
Órgão:
CIAAR
Prova:
Aeronáutica - 2022 - CIAAR - Primeiro Tenente - Engenharia Cartográfica |
Q1991516
Engenharia Cartográfica
Leia o texto abaixo para responder à questão.
“Sistemas de Aeronaves Não Tripuladas, em inglês, Unmanned Aircraft Systems (UAS), são um novo componente da aviação mundial que operadores, indústria e diversas organizações internacionais estão estudando e trabalhando para compreender, definir e, finalmente, promover sua completa integração no Espaço Aéreo. No Brasil, as Aeronaves Não Tripuladas ainda são amplamente conhecidas como drones (do inglês Zangão, termo muito utilizado pelos órgãos de imprensa), Veículos Aéreos Não Tripulados (VANT), nomenclatura oriunda do termo Unmanned Aerial Vehicle (UAV) e considerado obsoleto na comunidade aeronáutica internacional, ou Aeronave Remotamente Pilotada (ARP). A presente Instrução (ICA 100-40/2020) tem por finalidade regulamentar os procedimentos e responsabilidades necessários para o acesso seguro ao Espaço Aéreo Brasileiro por aeronaves não tripuladas.”
Fonte: ICA 100-40/2020 – DECEA (2022).
Informe Verdadeiro (V) ou Falso (F) o que se afirma sobre aeronaves não tripuladas e o acesso ao espaço aéreo brasileiro, com base na Instrução do Comando da Aeronáutica (ICA) 100-40, do Departamento de Controle do Espaço Aéreo (DECEA). Em seguida, marque a opção que apresenta a sequência correta.
( ) A altitude limite de voo e a altura de voo solicitada podem ser infringidas dependendo do relevo da localidade. ( ) Altura de voo solicitada é resultante da soma entre a altitude do ponto de decolagem declarado na solicitação de acesso ao espaço aéreo e a Altitude limite de voo. ( ) Somente as Aeronaves não tripuladas autônomas estarão sujeitas à autorização de utilização do espaço aéreo, com a devida atribuição de responsabilidades do piloto em comando. ( ) Entende-se por aeronave não tripuladas autônomas àquela que possibilita a intervenção do piloto, a qualquer momento, na condução e no gerenciamento do voo, mesmo tendo os parâmetros e os perfis de voos conduzidos por sistemas computacionais. ( ) Operação Extended Visual Line-Of-Sight (EVLOS), e aquela na qual o piloto mantém o contato visual direto com a aeronave (ou com auxílio de lentes ou outros equipamentos, exceto as lentes corretivas), de modo a conduzir o voo com as responsabilidades de manter a separação com outras aeronaves, bem como de evitar colisões com obstáculos.
“Sistemas de Aeronaves Não Tripuladas, em inglês, Unmanned Aircraft Systems (UAS), são um novo componente da aviação mundial que operadores, indústria e diversas organizações internacionais estão estudando e trabalhando para compreender, definir e, finalmente, promover sua completa integração no Espaço Aéreo. No Brasil, as Aeronaves Não Tripuladas ainda são amplamente conhecidas como drones (do inglês Zangão, termo muito utilizado pelos órgãos de imprensa), Veículos Aéreos Não Tripulados (VANT), nomenclatura oriunda do termo Unmanned Aerial Vehicle (UAV) e considerado obsoleto na comunidade aeronáutica internacional, ou Aeronave Remotamente Pilotada (ARP). A presente Instrução (ICA 100-40/2020) tem por finalidade regulamentar os procedimentos e responsabilidades necessários para o acesso seguro ao Espaço Aéreo Brasileiro por aeronaves não tripuladas.”
Fonte: ICA 100-40/2020 – DECEA (2022).
Informe Verdadeiro (V) ou Falso (F) o que se afirma sobre aeronaves não tripuladas e o acesso ao espaço aéreo brasileiro, com base na Instrução do Comando da Aeronáutica (ICA) 100-40, do Departamento de Controle do Espaço Aéreo (DECEA). Em seguida, marque a opção que apresenta a sequência correta.
( ) A altitude limite de voo e a altura de voo solicitada podem ser infringidas dependendo do relevo da localidade. ( ) Altura de voo solicitada é resultante da soma entre a altitude do ponto de decolagem declarado na solicitação de acesso ao espaço aéreo e a Altitude limite de voo. ( ) Somente as Aeronaves não tripuladas autônomas estarão sujeitas à autorização de utilização do espaço aéreo, com a devida atribuição de responsabilidades do piloto em comando. ( ) Entende-se por aeronave não tripuladas autônomas àquela que possibilita a intervenção do piloto, a qualquer momento, na condução e no gerenciamento do voo, mesmo tendo os parâmetros e os perfis de voos conduzidos por sistemas computacionais. ( ) Operação Extended Visual Line-Of-Sight (EVLOS), e aquela na qual o piloto mantém o contato visual direto com a aeronave (ou com auxílio de lentes ou outros equipamentos, exceto as lentes corretivas), de modo a conduzir o voo com as responsabilidades de manter a separação com outras aeronaves, bem como de evitar colisões com obstáculos.
Ano: 2022
Banca:
Aeronáutica
Órgão:
CIAAR
Prova:
Aeronáutica - 2022 - CIAAR - Primeiro Tenente - Engenharia Cartográfica |
Q1991515
Engenharia Cartográfica
Texto associado
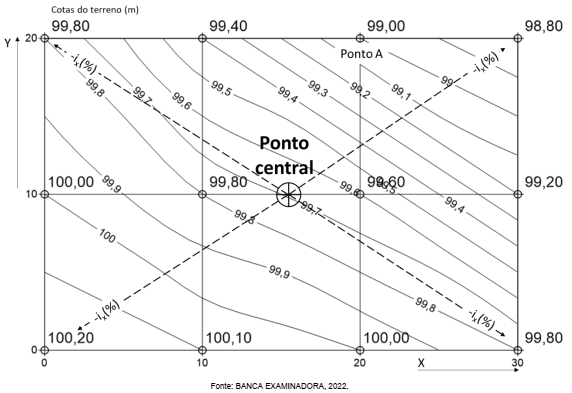
Deseja-se construir uma terraplenagem num pátio de um aeroporto, de tamanho 30m x 20m. Para tal, elaborou-se uma planta de pontos cotados com quadrículas de 10m x 10m, e sua respectiva planta planialtimétrica, com equidistância vertical igual a 0,10 metros. As cotas do terreno de cada ponto estão representadas acima e à direita de cada vértice desta malha de quadrículas.
TEXTO 1
Deseja-se construir uma terraplenagem num pátio de um aeroporto, de tamanho 30m x 20m. Para tal, elaborou-se uma planta de pontos cotados com quadrículas de 10m x 10m, e sua respectiva planta planialtimétrica, com equidistância vertical igual a 0,10 metros. As cotas do terreno de cada ponto estão representadas acima e à direita de cada vértice desta malha de quadrículas.
FIGURA 1
Com base no texto 1 e figura 1, em que a cota do greide da terraplenagem do “Ponto central” seja igual a 100,00, e
a inclinação de projeto de -2% para os pontos mais extremos (linha tracejada), formando apenas 4 planos inclinados.
Com base nesses dados, a altura de aterro no ponto de coordenadas X igual a 20 e Y igual a 20 (“Ponto A” na figura),
em metros, é igual a
Considere:
√155 ≅ 11. √255 ≅ 16. √295 ≅ 17. √325 ≅ 18
Considere:
√155 ≅ 11. √255 ≅ 16. √295 ≅ 17. √325 ≅ 18
Ano: 2022
Banca:
Aeronáutica
Órgão:
CIAAR
Prova:
Aeronáutica - 2022 - CIAAR - Primeiro Tenente - Engenharia Cartográfica |
Q1991514
Engenharia Cartográfica
Texto associado
Deseja-se construir uma terraplenagem num pátio de um aeroporto, de tamanho 30m x 20m. Para tal, elaborou-se uma planta de pontos cotados com quadrículas de 10m x 10m, e sua respectiva planta planialtimétrica, com equidistância vertical igual a 0,10 metros. As cotas do terreno de cada ponto estão representadas acima e à direita de cada vértice desta malha de quadrículas.
TEXTO 1
Deseja-se construir uma terraplenagem num pátio de um aeroporto, de tamanho 30m x 20m. Para tal, elaborou-se uma planta de pontos cotados com quadrículas de 10m x 10m, e sua respectiva planta planialtimétrica, com equidistância vertical igual a 0,10 metros. As cotas do terreno de cada ponto estão representadas acima e à direita de cada vértice desta malha de quadrículas.
FIGURA 1
Considere na figura 1, partir de um “ponto central”, de coordenadas X igual a 15 m e Y igual a 10 m, mantendo-se a
cota do greide da terraplenagem apenas deste ponto igual a 100,00m; e impondo-se uma inclinação de projeto de -
2% para os pontos mais extremos deste pátio (linha tracejada), de forma a construir-se apenas quatro greides planos
inclinados (estilo um “telhado de 4 águas”), para facilitar a drenagem natural.
Ao comparar-se o projeto desta nova terraplenagem sugerida acima, com a situação de apenas alterar a inclinação deste mesmo projeto para igual a 0% (um greide plano e horizontal e mantendo-se o mesmo “ponto central” de cota igual a 100,00m), o volume geométrico total de aterro desta nova configuração, dentro deste limite de 30m x 20m, irá
Ao comparar-se o projeto desta nova terraplenagem sugerida acima, com a situação de apenas alterar a inclinação deste mesmo projeto para igual a 0% (um greide plano e horizontal e mantendo-se o mesmo “ponto central” de cota igual a 100,00m), o volume geométrico total de aterro desta nova configuração, dentro deste limite de 30m x 20m, irá
Ano: 2022
Banca:
Aeronáutica
Órgão:
CIAAR
Prova:
Aeronáutica - 2022 - CIAAR - Primeiro Tenente - Engenharia Cartográfica |
Q1991513
Engenharia Cartográfica
Texto associado
Deseja-se construir uma terraplenagem num pátio de um aeroporto, de tamanho 30m x 20m. Para tal, elaborou-se uma planta de pontos cotados com quadrículas de 10m x 10m, e sua respectiva planta planialtimétrica, com equidistância vertical igual a 0,10 metros. As cotas do terreno de cada ponto estão representadas acima e à direita de cada vértice desta malha de quadrículas.
TEXTO 1
Deseja-se construir uma terraplenagem num pátio de um aeroporto, de tamanho 30m x 20m. Para tal, elaborou-se uma planta de pontos cotados com quadrículas de 10m x 10m, e sua respectiva planta planialtimétrica, com equidistância vertical igual a 0,10 metros. As cotas do terreno de cada ponto estão representadas acima e à direita de cada vértice desta malha de quadrículas.
FIGURA 1
Considerando-se a construção de um pátio perfeitamente plano, com cota do greide da terraplenagem igual 100,00
m, e sem estimar os volumes para a construção de possíveis taludes de corte/aterro, o cálculo para o volume
geométrico de aterro total, dentro deste limite de 30m x 20m, em metros cúbicos, é:
Ano: 2022
Banca:
Aeronáutica
Órgão:
CIAAR
Prova:
Aeronáutica - 2022 - CIAAR - Primeiro Tenente - Engenharia Cartográfica |
Q1991511
Engenharia Cartográfica
Informe Verdadeiro (V) ou Falso (F) em relação ao que se afirma a seguir sobre as Loxodrômicas e as Ortodrômicas,
considerando uma terra esférica. Em seguida, marque a opção que apresenta a sequência correta.
( ) Um arco do círculo máximo é uma Ortodrômica. ( ) Numa Loxodrômica os rumos magnéticos são iguais. ( ) Sobre a navegação numa Ortodrômica, mantem-se constante o rumo de percurso. ( ) Navegando-se sobre o Equador, percorrem-se rotas Ortodrômicas e Loxodrômicas. ( ) Se uma aeronave percorre a menor distância entre estes dois pontos, refere-se a uma linha Loxodrômica.
( ) Um arco do círculo máximo é uma Ortodrômica. ( ) Numa Loxodrômica os rumos magnéticos são iguais. ( ) Sobre a navegação numa Ortodrômica, mantem-se constante o rumo de percurso. ( ) Navegando-se sobre o Equador, percorrem-se rotas Ortodrômicas e Loxodrômicas. ( ) Se uma aeronave percorre a menor distância entre estes dois pontos, refere-se a uma linha Loxodrômica.
Ano: 2022
Banca:
Aeronáutica
Órgão:
CIAAR
Prova:
Aeronáutica - 2022 - CIAAR - Primeiro Tenente - Engenharia Cartográfica |
Q1991508
Engenharia Cartográfica
Uma pista de um aeroporto de comprimento igual a 2.500,00 m possui uma inclinação longitudinal, partindo de sua
origem, igual a +1,5%. Considerando que a altitude desta origem é igual a 1.234,56 m, a altitude da extremidade
oposta, em metros, é igual a:
Ano: 2022
Banca:
Aeronáutica
Órgão:
CIAAR
Prova:
Aeronáutica - 2022 - CIAAR - Primeiro Tenente - Engenharia Cartográfica |
Q1991507
Engenharia Cartográfica
Através de uma imagem do Google Earth (2022), desenhou-se um polígono de parte do pátio de manobras do
Aeroporto de Guarulhos (SP), obtendo-se as medidas gráficas, em centímetros, conforme figura abaixo.
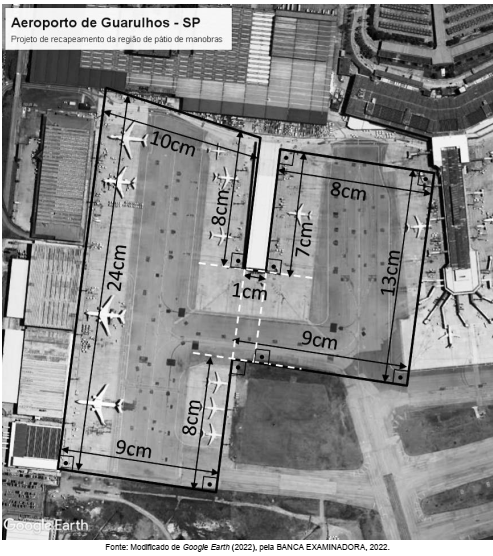
Considerando que a escala deste desenho é 1:1.000, a estimativa para a área deste polígono, em hectares (ha) é:
Considerando que a escala deste desenho é 1:1.000, a estimativa para a área deste polígono, em hectares (ha) é:
Ano: 2022
Banca:
Aeronáutica
Órgão:
CIAAR
Prova:
Aeronáutica - 2022 - CIAAR - Primeiro Tenente - Engenharia Cartográfica |
Q1991506
Engenharia Cartográfica
Ainda hoje a navegação aérea faz uso corriqueiro da bússola magnética como equipamento de orientação. Na figura
abaixo se tem um trecho de uma carta magnética do Brasil, publicada em 2012.0, construída pelo Observatório
Nacional (ON). Observa-se que para a data da carta, a declinação magnética em São Paulo (capital – destacado com
um pequeno círculo) era de aproximadamente 20o 25’ W. A variação anual desta declinação também pode ser obtida
pela carta.
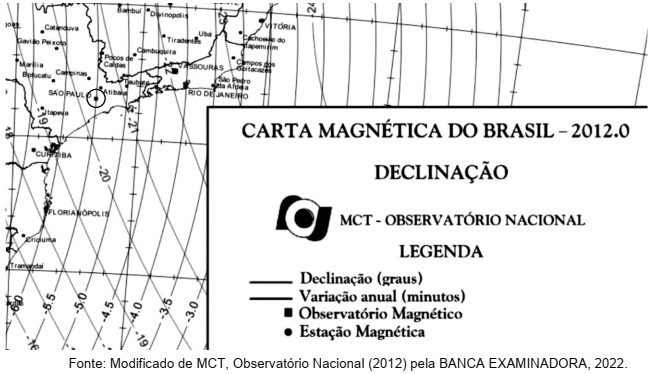
Com base nas informações acima, e considerando que o azimute verdadeiro de um voo de São Paulo (SP) para o Rio de Janeiro (RJ) seja igual a 95º 00’; o azimute magnético de SP => RJ em 2022.0, será igual a
Com base nas informações acima, e considerando que o azimute verdadeiro de um voo de São Paulo (SP) para o Rio de Janeiro (RJ) seja igual a 95º 00’; o azimute magnético de SP => RJ em 2022.0, será igual a
Ano: 2022
Banca:
Aeronáutica
Órgão:
CIAAR
Prova:
Aeronáutica - 2022 - CIAAR - Primeiro Tenente - Engenharia Cartográfica |
Q1991504
Engenharia Cartográfica
Nas cartas aeronáuticas são traçados alguns alinhamentos e rotas com base em linhas Isogônicas. Este segmento
é definido como uma linha em uma carta na qual todos os pontos têm a mesma
Ano: 2022
Banca:
Aeronáutica
Órgão:
CIAAR
Prova:
Aeronáutica - 2022 - CIAAR - Primeiro Tenente - Engenharia Cartográfica |
Q1991503
Engenharia Cartográfica
Leia o texto abaixo para responder à questão.
“A Cartografia Aeronáutica abrange o conjunto de estudos e operações técnicas para elaboração das cartas aeronáuticas padronizadas, destinadas à navegação aérea. No Brasil, a atividade é exercida pelo Instituto de Cartografia Aeronáutica (ICA), unidade subordinada ao Departamento de Controle do Espaço Aéreo (DECEA), que vem oportunamente incorporando inovações tecnológicas nos processos de gestão e desenvolvimento das mesmas. De posse destas cartas, geridas, desenvolvidas e atualizadas regularmente pela organização, as aeronaves obtêm a orientação espacial adequada para cruzar os céus, com segurança e eficácia, ao longo dos cerca de 22 milhões de km² de espaço aéreo sob responsabilidade brasileira.”
Fonte: https://www.decea.mil.br/?i=atividades&p=cartografia-aeronautica.
Associe as colunas relacionando o nome das cartas aeronáuticas publicadas pelo DECEA com aplicabilidade.
Nome da Carta
(1) Carta Topográfica para Aproximação de Precisão.
(2) Carta de Aproximação por Instrumentos. (3) Carta de Aeródromo/Heliporto. (4) Carta Aeronáutica Mundial.
Aplicabilidade
( ) Cartas destinadas aos movimentos de aeronaves no solo. ( ) Cartas destinadas exclusivamente ao planejamento de voo. ( ) Cartas destinadas à navegação aérea visual, planejamento e determinação de posição. ( ) Cartas destinadas às fases de voo compreendidas entre a decolagem e o pouso.
A sequência correta dessa classificação é:
“A Cartografia Aeronáutica abrange o conjunto de estudos e operações técnicas para elaboração das cartas aeronáuticas padronizadas, destinadas à navegação aérea. No Brasil, a atividade é exercida pelo Instituto de Cartografia Aeronáutica (ICA), unidade subordinada ao Departamento de Controle do Espaço Aéreo (DECEA), que vem oportunamente incorporando inovações tecnológicas nos processos de gestão e desenvolvimento das mesmas. De posse destas cartas, geridas, desenvolvidas e atualizadas regularmente pela organização, as aeronaves obtêm a orientação espacial adequada para cruzar os céus, com segurança e eficácia, ao longo dos cerca de 22 milhões de km² de espaço aéreo sob responsabilidade brasileira.”
Fonte: https://www.decea.mil.br/?i=atividades&p=cartografia-aeronautica.
Associe as colunas relacionando o nome das cartas aeronáuticas publicadas pelo DECEA com aplicabilidade.
Nome da Carta
(1) Carta Topográfica para Aproximação de Precisão.
(2) Carta de Aproximação por Instrumentos. (3) Carta de Aeródromo/Heliporto. (4) Carta Aeronáutica Mundial.
Aplicabilidade
( ) Cartas destinadas aos movimentos de aeronaves no solo. ( ) Cartas destinadas exclusivamente ao planejamento de voo. ( ) Cartas destinadas à navegação aérea visual, planejamento e determinação de posição. ( ) Cartas destinadas às fases de voo compreendidas entre a decolagem e o pouso.
A sequência correta dessa classificação é:
Q1777557
Engenharia Cartográfica
Quanto aos meridianos verdadeiros, assinale a alternativa
incorreta.
Ano: 2018
Banca:
Aeronáutica
Órgão:
CIAAR
Prova:
Aeronáutica - 2018 - CIAAR - Primeiro Tenente - Engenharia Cartográfica |
Q902697
Engenharia Cartográfica
As observações de campo na Topografia e na Geodésia estão sujeitas a erros. Nas observações no Global
Navigation Satellite System (GNSS) as fontes de erros são diversas, podendo estar no satélite, no trajeto do
sinal do satélite até a antena em terra, no receptor ou na antena. A seguir, são apresentados alguns tipos de
erros nas observações GNSS.
Associe as colunas, relacionando o tipo de erro com a definição, ocorrência ou técnica de eliminação.
TIPO DE ERRO (1) Orbitais (2) Por multicaminhamento (3) Por perdas de ciclo (4) Do centro de fase
DEFINIÇÃO, OCORRÊNCIA OU TÉCNICA DE ELIMINAÇÃO ( ) Ocorre quando, durante o rastreio, há obstrução no sinal de um ou mais satélites. ( ) Podem ser eliminados com o uso de efemérides precisas. ( ) O uso de antenas de mesmo fabricante e orientação para uma mesma direção, reduz o efeito. ( ) Erro de ocorrência aleatória e não há modelo para tratar seu efeito.
A sequência correta é
Associe as colunas, relacionando o tipo de erro com a definição, ocorrência ou técnica de eliminação.
TIPO DE ERRO (1) Orbitais (2) Por multicaminhamento (3) Por perdas de ciclo (4) Do centro de fase
DEFINIÇÃO, OCORRÊNCIA OU TÉCNICA DE ELIMINAÇÃO ( ) Ocorre quando, durante o rastreio, há obstrução no sinal de um ou mais satélites. ( ) Podem ser eliminados com o uso de efemérides precisas. ( ) O uso de antenas de mesmo fabricante e orientação para uma mesma direção, reduz o efeito. ( ) Erro de ocorrência aleatória e não há modelo para tratar seu efeito.
A sequência correta é
Ano: 2018
Banca:
Aeronáutica
Órgão:
CIAAR
Prova:
Aeronáutica - 2018 - CIAAR - Primeiro Tenente - Engenharia Cartográfica |
Q902696
Engenharia Cartográfica
Levantamento georreferenciado na superfície terrestre foi revolucionado com o advento dos satélites. O
Global Navigation Satellite Systems (GNSS) oferece informações precisas de tempo e posicionamento na
quase totalidade do planeta com alta confiabilidade, agilidade e eficiência. As operações de campo podem
ser desenvolvidas dia ou noite e sem a necessidade de intervisibilidade entre as estações. Isso representa
uma mudança extraordinária nos procedimentos convencionais de levantamento.
Em relação ao posicionamento por satélites GNSS é correto afirmar que
Em relação ao posicionamento por satélites GNSS é correto afirmar que
Ano: 2018
Banca:
Aeronáutica
Órgão:
CIAAR
Prova:
Aeronáutica - 2018 - CIAAR - Primeiro Tenente - Engenharia Cartográfica |
Q902695
Engenharia Cartográfica
O posicionamento por ponto preciso ou posicionamento absoluto preciso (PPP) é um serviço gratuito e
online disponibilizado pelo Instituto Brasileiro de Geografia e Estatística (IBGE). Esse serviço realiza pósprocessamento
de dados do Global Navigation Satellite System (GNSS) utilizando o programa CSRS-PP
desenvolvido pelo Geodetic Survey Division of Natural Resources of Canadá (NRCan). O serviço permite que
usuários GNSS obtenham coordenadas de precisão no Sistema de Referência Geocêntrico para as Américas
(SIRGAS2000) e no International Terrestrial Reference Frame (ITRF). Para o processamento, o usuário deve
carregar no aplicativo online, arquivo de observações nos formatos RINEX ou HATANAKA.
Para gerar os resultados, ou seja, coordenadas precisas da estação/base do usuário, além do arquivo de observações, o IBGE-PPP utiliza outros dados, em relação a esses últimos.
Marque a que apresenta descrição correta.
Para gerar os resultados, ou seja, coordenadas precisas da estação/base do usuário, além do arquivo de observações, o IBGE-PPP utiliza outros dados, em relação a esses últimos.
Marque a que apresenta descrição correta.
Ano: 2018
Banca:
Aeronáutica
Órgão:
CIAAR
Prova:
Aeronáutica - 2018 - CIAAR - Primeiro Tenente - Engenharia Cartográfica |
Q902694
Engenharia Cartográfica
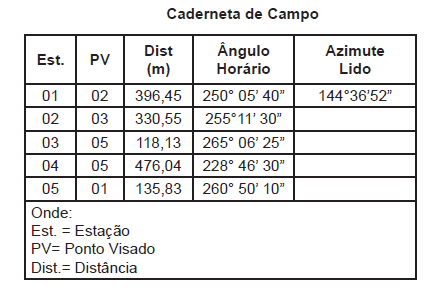
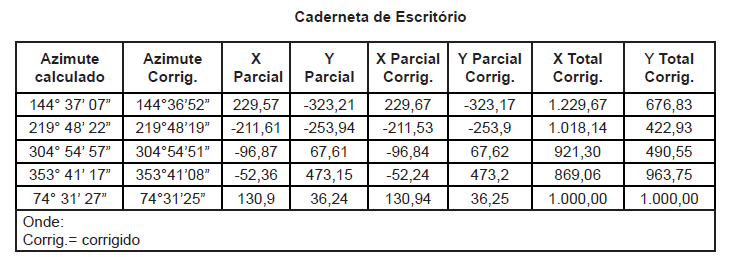
Foi realizado um levantamento topográfico de um terreno onde futuramente será erguido um novo prédio
da Academia da Força Aérea Brasileira (AFA). Trata-se de uma poligonal fechada com 5 (cinco) vértices
medidos na classe IIIP, que trata de levantamentos topográficos para projetos básicos, executivos, as built
e obras de engenharia. Medição angular pelo método das direções com duas séries de leitura conjugadas
direta e inversa. Leitura linear com leituras recíprocas (vante e ré) com distanciômetro eletrônico.
O resumo das observações e cálculos de escritório é apresentado nas planilhas, das cadernetas a seguir.
Fonte: Arquivo da Banca Elaboradora.
Fonte: Arquivo da Banca Elaboradora.
“Equipamento utilizado: Estação total Classe II – desvio padrão na medida angular menor ou igual a 02” e desvio padrão na medida linear de ±3 mm+2ppm.
Para a Classe IIIP de poligonal planimétrica tem-se:
Tolerância para erro angular = 20” Tolerância para erro linear = 0,42m
São dados: √5 = 2,23; √1,457 = 1,20; √0,1594 = 0,40
Observando as planilhas e os dados fornecidos, avalie e marque a alternativa correta.
O resumo das observações e cálculos de escritório é apresentado nas planilhas, das cadernetas a seguir.
Fonte: Arquivo da Banca Elaboradora.
Fonte: Arquivo da Banca Elaboradora.
“Equipamento utilizado: Estação total Classe II – desvio padrão na medida angular menor ou igual a 02” e desvio padrão na medida linear de ±3 mm+2ppm.
Para a Classe IIIP de poligonal planimétrica tem-se:
Tolerância para erro angular = 20” Tolerância para erro linear = 0,42m
São dados: √5 = 2,23; √1,457 = 1,20; √0,1594 = 0,40
Observando as planilhas e os dados fornecidos, avalie e marque a alternativa correta.
Ano: 2018
Banca:
Aeronáutica
Órgão:
CIAAR
Prova:
Aeronáutica - 2018 - CIAAR - Primeiro Tenente - Engenharia Cartográfica |
Q902693
Engenharia Cartográfica
A Gravimetria consiste em um conjunto de técnicas e operações que tem por finalidade a medida da intensidade
da aceleração da gravidade em qualquer local que esteja sob a influência do campo gravitacional terrestre.
A gravidade terrestre em um ponto da superfície terrestre é a resultante entre a força de atração exercida
pelas massas terrestres e a força centrífuga, que atuam sobre uma unidade de massa situada neste ponto.
A respeito dos gravímetros analise as afirmativas a seguir
I. O gravímetro convencional analógico está baseado no conceito de longitude de elasticidade zero desenvolvida por Lascoste, constituído de um sistema de massa-mola, que permite medir a variação da força da gravidade entre dois locais. O sistema é equilibrado por uma força contrária ao peso do corpo, geralmente elástica (mola). Sob a ação da gravidade, a mola sofre uma deformação, proporcional ao módulo, da força que a produz. II. Nos gravímetros digitais, o sensor é baseado em um sistema elástico de quartzo. A força gravitacional afeta uma massa sensível a que gera uma pequena força eletrostática. A posição da massa é alterada pela mudança da gravidade. Um alimentador automático aplica uma voltagem DC na placa do capacitor, produzindo uma força eletromagnética na massa, a que volta a posição nula. A voltagem, que é a observação do valor relativo da gravidade no vértice observado, é convertida em um sinal digital e registrada na memória do equipamento. III. O gravímetro supercondutor baseia-se numa esfera que flutua livremente num campo magnético, o que é produzido por correntes em bobinas supercondutoras a -268°C. As forças gravitacionais externas, provocam, uma mudança na posição da esfera dentro do campo magnético livre. Para manter a posição da esfera, um conjunto de circuitos de controle mantém a posição da esfera mediante adição ou remoção de uma voltagem e, através de inteligência artificial, essa variação na voltagem é transformada em dados de variação dos parâmetros gravitacionais.
Está correto o que se afirma em
A respeito dos gravímetros analise as afirmativas a seguir
I. O gravímetro convencional analógico está baseado no conceito de longitude de elasticidade zero desenvolvida por Lascoste, constituído de um sistema de massa-mola, que permite medir a variação da força da gravidade entre dois locais. O sistema é equilibrado por uma força contrária ao peso do corpo, geralmente elástica (mola). Sob a ação da gravidade, a mola sofre uma deformação, proporcional ao módulo, da força que a produz. II. Nos gravímetros digitais, o sensor é baseado em um sistema elástico de quartzo. A força gravitacional afeta uma massa sensível a que gera uma pequena força eletrostática. A posição da massa é alterada pela mudança da gravidade. Um alimentador automático aplica uma voltagem DC na placa do capacitor, produzindo uma força eletromagnética na massa, a que volta a posição nula. A voltagem, que é a observação do valor relativo da gravidade no vértice observado, é convertida em um sinal digital e registrada na memória do equipamento. III. O gravímetro supercondutor baseia-se numa esfera que flutua livremente num campo magnético, o que é produzido por correntes em bobinas supercondutoras a -268°C. As forças gravitacionais externas, provocam, uma mudança na posição da esfera dentro do campo magnético livre. Para manter a posição da esfera, um conjunto de circuitos de controle mantém a posição da esfera mediante adição ou remoção de uma voltagem e, através de inteligência artificial, essa variação na voltagem é transformada em dados de variação dos parâmetros gravitacionais.
Está correto o que se afirma em
Ano: 2018
Banca:
Aeronáutica
Órgão:
CIAAR
Prova:
Aeronáutica - 2018 - CIAAR - Primeiro Tenente - Engenharia Cartográfica |
Q902692
Engenharia Cartográfica
Para a construção de um novo prédio no centro de Instrução e Adaptação da Aeronáutica (CIAAR), foi
realizado o levantamento planialtimétrico do terreno, e elaborado o perfil topográfico de uma linha longitudinal
(AA’) que passa pelo centro do mesmo. De acordo com o projeto executivo, a obra deverá ficar sobre o
patamar de cota igual a 705,00m.
O perfil topográfico da linha AA’ e o patamar são apresentados a seguir.
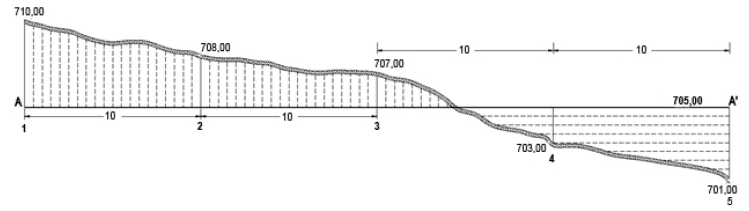
Fonte: Arquivo da Banca Elaboradora.
Após observado o croqui, analise as afirmativas abaixo
I. A diferença de nível longitudinal total do terreno é de 9,0m (nove metros). II. Entre as estacas 3 e 4 haverá uma transição entre corte e aterro, respectivamente. III. Para implantar o patamar AA’ (terraplenagem) haverá um corte de 3,0m (três metros) na estacada 2.
Está correto o que afirma em
O perfil topográfico da linha AA’ e o patamar são apresentados a seguir.
Fonte: Arquivo da Banca Elaboradora.
Após observado o croqui, analise as afirmativas abaixo
I. A diferença de nível longitudinal total do terreno é de 9,0m (nove metros). II. Entre as estacas 3 e 4 haverá uma transição entre corte e aterro, respectivamente. III. Para implantar o patamar AA’ (terraplenagem) haverá um corte de 3,0m (três metros) na estacada 2.
Está correto o que afirma em
Ano: 2018
Banca:
Aeronáutica
Órgão:
CIAAR
Prova:
Aeronáutica - 2018 - CIAAR - Primeiro Tenente - Engenharia Cartográfica |
Q902691
Engenharia Cartográfica
Em relação ao estudo da Teoria dos erros pode-se afirmar que a
I. Discrepância é a diferença entre dois valores observados da mesma quantidade. II. Precisão refere-se ao grau de refinamento ou consistência de um grupo de observações e á avaliada com base no tamanho da discrepância. Está vinculada apenas a efeitos aleatórios. III. Acuraria indica a proximidade absoluta das quantidades observadas com seus valores verdadeiros. Está vinculada a efeitos aleatórios e sistemáticos.
Está correto o que se afirma em
I. Discrepância é a diferença entre dois valores observados da mesma quantidade. II. Precisão refere-se ao grau de refinamento ou consistência de um grupo de observações e á avaliada com base no tamanho da discrepância. Está vinculada apenas a efeitos aleatórios. III. Acuraria indica a proximidade absoluta das quantidades observadas com seus valores verdadeiros. Está vinculada a efeitos aleatórios e sistemáticos.
Está correto o que se afirma em
Ano: 2018
Banca:
Aeronáutica
Órgão:
CIAAR
Prova:
Aeronáutica - 2018 - CIAAR - Primeiro Tenente - Engenharia Cartográfica |
Q902690
Engenharia Cartográfica
Memorial Descritivo
Gleba urbana com área de 4.697,9747m² e perímetro de 278,35m, com a seguinte descrição perimétrica: inicia no Marco 01 de coordenadas E= 623.772,05m e N=7.683.228,71m, deste, com azimute 177° 45’ 29” e distância de 56,49m chega-se ao Marco 02 de coordenadas E= 623.774,26m e N= 7.683.172,26m, deste, com azimute de 273° 32’ 06” e distância de 83,20m chega-se ao Marco 03 de coordenadas E= 623.691,22m e N= 7.683.177,39m, deste, com azimute de 03° 05’ 11” e distância de 60,55m chega-se ao Marco 04 de coordenadas E= 623.694,48m e N= 7.683.237,85m, deste, com azimute de 96° 43’ 12” e distância de 78,11m chega-se ao Marco 01, inicial desta descrição. As coordenadas UTM estão referenciadas ao Sistema de Referência SIRGAS 2000, Meridiano Central 45°W.
De acordo com o memorial descritivo apresentado para uma área urbana, marque a alternativa que representa o desenho planimétrico dos limites do referido terreno.
Gleba urbana com área de 4.697,9747m² e perímetro de 278,35m, com a seguinte descrição perimétrica: inicia no Marco 01 de coordenadas E= 623.772,05m e N=7.683.228,71m, deste, com azimute 177° 45’ 29” e distância de 56,49m chega-se ao Marco 02 de coordenadas E= 623.774,26m e N= 7.683.172,26m, deste, com azimute de 273° 32’ 06” e distância de 83,20m chega-se ao Marco 03 de coordenadas E= 623.691,22m e N= 7.683.177,39m, deste, com azimute de 03° 05’ 11” e distância de 60,55m chega-se ao Marco 04 de coordenadas E= 623.694,48m e N= 7.683.237,85m, deste, com azimute de 96° 43’ 12” e distância de 78,11m chega-se ao Marco 01, inicial desta descrição. As coordenadas UTM estão referenciadas ao Sistema de Referência SIRGAS 2000, Meridiano Central 45°W.
De acordo com o memorial descritivo apresentado para uma área urbana, marque a alternativa que representa o desenho planimétrico dos limites do referido terreno.