Questões Militares
Para engenharia
Foram encontradas 1.057 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
Analise as afirmativas abaixo.
Ao observar o ciclo de funcionamento de um motor alternativo de quatro tempos, quatro cilindros, com a seguinte ordem de queima: 1-3-4-2, pode-se afirmar que:
I - a cada meia volta do girabrequim, ocorre uma combustão.
II - na primeira volta do girabrequim, os pistões 2 e 4 estão no I o e no 2 o tempo, respectivamente.
III- na terceira meia volta do girabrequim, os pistões 1 e 3 estão no I o e no 4 o tempo respectivamente.
Assinale a opção correta.
De acordo com o conceito de alturas de elevação, no estudo das bombas, analise as afirmativas abaixo.
I -_Altura estática de aspiração - É a diferença de cotas entre o nível do centro da bomba e o da superfície livre do reservatório de captação.
II - Altura estática de recalque - É a diferença de cotas entre os níveis em que o líquido é abandonado ao sair pelo tubo de recalque, no meio ambiente (ou outro), e o nível livre do reservatório de captação.
III- Altura estática de elevação - É a diferença de cotas entre os níveis em que o líquido é abandonado no meio ambiente (ou outro), ao sair pelo tubo de recalque, e o nível livre do centro da bomba.
Com base na Convenção Internacional para Salvaguarda da Vida Humana no Mar (SOLAS), analise as afirmativas abaixo.
I - Os Governos Contratantes de Estados que não sejam membros da Organização não terão direito a participar das deliberações do Comitê de Segurança Marítima para o exame e adoção das emendas.
II - Toda emenda proposta por um Governo Contratante será submetida ao Secretário Geral da Organização e distribuída por este a todos os membros da Organização e a todos os Governos Contratantes com uma antecedência mínima de seis meses antes de ser considerada pela Organização.
III- As emendas serão adotadas por uma maioria de dois quintos dos Governos Contratantes presentes e votantes no Comitê de Segurança Marítima.
Assinale a opção correta.
Coloque V (verdadeiro) ou F (falso) nas afirmativas abaixo com relação à operação com fusíveis e disjuntores, e assinale a opção que apresenta a sequência correta.
( ) Os fusíveis e disjuntores são dispositivos de proteção que abrem o circuito quando o limite de corrente é ultrapassado .
( ) Para evitar queimar um fusível, deve-se usar como elemento fusível um fio muito resistente.
( ) Para proteger um circuito que opera a 20A e que queima a partir de 50A, deve-se usar um fusível maior que 20A, mas menor que 50A
( ) O fusível é descartável, pois o elemento fusível queima.
( ) 0 disjuntor desarma e pode ser rearmado.
Observe a figura a seguir.
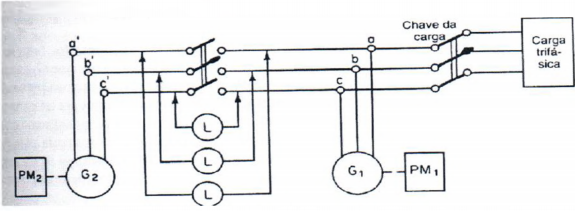
Analise as afirmativas abaixo.
Os métodos mais comuns de degelo de serpentinas de refrigeração são:
I - a r .
II - água.
III- elétrico.
IV - gás Quente.
V - gás Refrigerado.
Assinale a opção correta.