Questões de Concurso
Sobre automação industrial para engenharia de automação em engenharia de automação
Foram encontradas 53 questões
Ano: 2023
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2023 - Transpetro - Profissional Transpetro de Nível Superior - Junior: Ênfase 17: Engenharia de Automação |
Q2328591
Engenharia de Automação
Um sistema automatizado é composto por três elementos: 1 - Sistema de Energia; 2 - Programa de Instruções;
e 3 - Sistema de Controle.
Considerando-se uma operação automatizada de torneamento, o programa de instruções
Considerando-se uma operação automatizada de torneamento, o programa de instruções
Ano: 2023
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2023 - Transpetro - Profissional Transpetro de Nível Superior - Junior: Ênfase 17: Engenharia de Automação |
Q2328590
Engenharia de Automação
Pode-se definir Sistema de Manufatura como uma coleção de equipamentos e recursos humanos integrados,
com a função de realizar tarefas e operações de processamentos de fabricação e montagem.
Alguns exemplos de Sistema de Manufatura são: células individuais, agrupamento de máquinas, linha de montagem manual, linha de transferência automatizada, sistema de montagem automatizado, células de máquinas, sistema de manufatura flexível, e outros.
A seguinte descrição representa um Sistema de Manufatura Flexível:
Alguns exemplos de Sistema de Manufatura são: células individuais, agrupamento de máquinas, linha de montagem manual, linha de transferência automatizada, sistema de montagem automatizado, células de máquinas, sistema de manufatura flexível, e outros.
A seguinte descrição representa um Sistema de Manufatura Flexível:
Ano: 2023
Banca:
IF-SP
Órgão:
IF-SP
Prova:
IF-SP - 2023 - IF-SP - Técnico de Laboratório/Área: Mecatrônica |
Q2287675
Engenharia de Automação
Dentro da indústria de manufatura, a programação offline (OLP) tem se tornado uma prática
comum na programação de robôs. Com relação à
OLP, qual das seguintes afirmações é verdadeira?
Ano: 2023
Banca:
IF-SP
Órgão:
IF-SP
Prova:
IF-SP - 2023 - IF-SP - Técnico de Laboratório/Área: Mecatrônica |
Q2287674
Engenharia de Automação
Em uma fábrica de eletrônicos, um robô industrial é utilizado para a montagem de placas de
circuito. A velocidade e a precisão do robô são essenciais para garantir a qualidade do produto e otimizar a produção. Nesse contexto, o acionamento
por servomecanismo é fundamental.
O que diferencia um servomecanismo de outros tipos de acionamentos em robótica?
O que diferencia um servomecanismo de outros tipos de acionamentos em robótica?
Ano: 2023
Banca:
IF-SP
Órgão:
IF-SP
Prova:
IF-SP - 2023 - IF-SP - Técnico de Laboratório/Área: Mecatrônica |
Q2287669
Engenharia de Automação
Em uma indústria petroquímica, um tanque
de reação química é controlado por um sistema
PID. O controlador é responsável por manter o nível do líquido do tanque dentro de certos limites
pré-definidos. Um operador observou que, apesar
do nível do líquido se estabilizar corretamente no
ponto desejado, há uma oscilação persistente em
torno desse ponto.
Com base nessa observação, qual alteração no controlador PID poderia corrigir esse comportamento?
Com base nessa observação, qual alteração no controlador PID poderia corrigir esse comportamento?
Ano: 2023
Banca:
IF-SP
Órgão:
IF-SP
Prova:
IF-SP - 2023 - IF-SP - Técnico de Laboratório/Área: Mecatrônica |
Q2287653
Engenharia de Automação
Em um sistema de logística, um robô é utilizado para direcionar pacotes para diferentes destinos com base em um código de barras presente em
cada pacote. O robô funciona com uma máquina
de estados com quatro estados: S0, S1, S2 e S3,
que representam diferentes destinos. A lógica da
máquina de estados é:
• No estado S0: com entrada 1, vai para S1; com entrada 0, permanece em S0.
• No estado S1: com entrada 1, vai para S2; com entrada 0, volta para S0.
• No estado S2: com entrada 1, retorna para S1; com entrada 0, vai para S3.
• No estado S3: independente da entrada, retorna para S0.
Se o robô começa no estado S0 e recebe as entradas: 1, 1, 0, qual será o estado final?
• No estado S0: com entrada 1, vai para S1; com entrada 0, permanece em S0.
• No estado S1: com entrada 1, vai para S2; com entrada 0, volta para S0.
• No estado S2: com entrada 1, retorna para S1; com entrada 0, vai para S3.
• No estado S3: independente da entrada, retorna para S0.
Se o robô começa no estado S0 e recebe as entradas: 1, 1, 0, qual será o estado final?
Q2182396
Engenharia de Automação
Qual é a função de um atuador em um robô?
Q2182390
Engenharia de Automação
Automação de sistemas industriais pode ser obtida com a utilização de dispositivos para acionamentos
eletromecânicos.
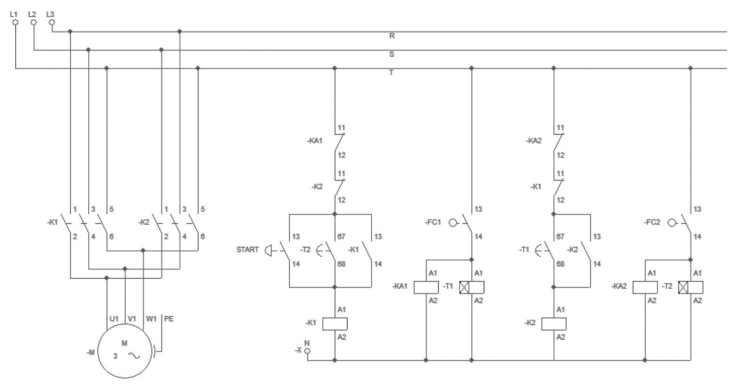
Interpretando os diagramas de comando e força acima, pode-se entender que o sistema foi concebido para:
Interpretando os diagramas de comando e força acima, pode-se entender que o sistema foi concebido para:
Ano: 2018
Banca:
FUNDEP (Gestão de Concursos)
Órgão:
INB
Prova:
FUNDEP (Gestão de Concursos) - 2018 - INB - Engenheiro de Automação e Controle |
Q1103242
Engenharia de Automação
Desde seu surgimento, a linguagem de programação
Ladder se configurou com uma das linguagens de
programação para controladores lógicos programáveis
mais utilizadas na indústria.
Em relação a essa linguagem, assinale a alternativa
CORRETA.
Ano: 2018
Banca:
FUNDEP (Gestão de Concursos)
Órgão:
INB
Prova:
FUNDEP (Gestão de Concursos) - 2018 - INB - Engenheiro de Automação e Controle |
Q1103241
Engenharia de Automação
A criação de diversos modelos de equipamentos
dedicados à automação industrial gerou uma grande
variedade de equipamentos e, como consequência,
surgiram diversas linguagens para programação de
controladores lógicos programáveis, – CLPs.
São linguagens gráficas específicas para CLPs,
EXCETO:
Ano: 2016
Banca:
INSTITUTO AOCP
Órgão:
EBSERH
Prova:
INSTITUTO AOCP - 2016 - EBSERH - Engenheiro Clínico (CH-UFPA) |
Q732736
Engenharia de Automação
O padrão RS-232 é amplamente utilizado para
comunicação entre o CLP e a PRINTER em
autoclaves e termodesinfectoras. Quando o
conector utilizado for o modelo DB-25, qual
pino usualmente corresponde ao GND?
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541203
Engenharia de Automação
Em relação ao nível de flexibilidade dos sistemas flexíveis de manufatura (FMS), é CORRETO afirmar que:
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541202
Engenharia de Automação
Texto associado
Com relação ao Sistema Digital de Controle Distribuído (SDCD) e ao Controlador Lógico Programável (CLP), verifique se as alternativas abaixo são CERTAS (C) ou ERRADAS (E):
( ) Um SDCD apresenta como benefícios a execução multitarefas em paralelo e redundância embutida.
( ) Um CLP é um controlador baseado em microprocessador que usa instruções guardadas na memória programável para implementar funções de lógica, sequenciamento, temporização, contagem e controle aritmético.
( ) Os CLPs atuais são usados tanto para aplicações de controle contínuo como para de controle discreto, tanto nas indústrias de processo como nas de produção discreta.
( ) O conceito de controle distribuído se aplica igualmente bem em CLPs, já que vários CLPs podem ser distribuídos pela fábrica para controlar equipamentos individuais, mas integrados por meio de uma rede de comunicação em comum.
A alternativa que contém a sequência de respostas corretas, na ordem de cima para baixo, é:
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541198
Engenharia de Automação
Texto associado
Leia as afirmativas expostas abaixo sobre a relação entre os tipos de instalação e layouts utilizados para diferentes níveis de quantidade produzida e variedade de produto:
I. Em caso de produtos grandes e pesados, onde a produção é feita por encomenda e onde há dificuldade de deslocamento, o layout de posição fixa é utilizado ao menos durante a montagem final e as peças individuais destes grandes produtos fazem uso do layout por produto.
II. A produção em quantidade envolve a produção em massa de peças individuais, e normalmente envolve máquinas-padrão que ficam dedicadas à produção de um tipo de peça. Neste tipo de produção a organização física típica é a do layout por processo.
III. O layout celular é utilizado quando a faixa de produção é média e quando a variedade de produto é leve, onde cada célula é especializada na produção de uma variedade limitada de configurações de peças.
Assinale a alternativa em que toda(s) a(s) afirmativa(s) está(ão) CORRETA(S):
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541196
Engenharia de Automação
Texto associado
Em relação à programação de robôs, assinale a única alternativa que apresenta uma correspondência correta de itens numerados em romano com itens em ordem alfabética:
I. Pode ser feita online.
II. É baseada em linguagens textuais.
III. Reduz o tempo de parada de produção.
IV. Pode conter lógicas complexas.
V. Utilizável apenas para operações de repetição de pontos.
A. Programação por demonstração/repetição.
B. Programação por linguagens de robôs.
C. Programação por linguagens de tarefas.
Conforme acima citado, segue abaixo.
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541194
Engenharia de Automação
Texto associado
Em relação às afirmativas abaixo, marque a alternativa correta:
I. Um robô com mais de seis graus de liberdade é intrinsecamente redundante, no que tange ao posicionamento com destreza do efetuador final no espaço 3D.
II. Robôs de cadeia fechada e paralelos são inerentemente redundantes.
III. Os manipuladores cinematicamente redundantes permitem infinitas soluções dasua cinemática inversa para uma postura particular do efetuador final.
IV. A redundância é um conceito relativo à tarefa definida para o manipulador final, ou seja, o mesmo manipulador pode ser redundante para determinada tarefa e não redundante para outra.
Assinale a alternativa em que toda(s) a(s) afirmativa(s) está(ão) CORRETA(S):
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541192
Engenharia de Automação
Em relação às afirmativas abaixo sobre a definição de graus de liberdade de um manipulador.
I. Número de variáveis independentes necessárias para especificar completamente a configuração de uma cadeia cinemática em relação a uma referência.
II. Dimensão do espaço de configuração de um manipulador.
III. Número de juntas de um manipulador, serial ou paralelo.
Assinale a alternativa em que toda(s) a(s) afirmativa(s) está(ão) CORRETA(S):
I. Número de variáveis independentes necessárias para especificar completamente a configuração de uma cadeia cinemática em relação a uma referência.
II. Dimensão do espaço de configuração de um manipulador.
III. Número de juntas de um manipulador, serial ou paralelo.
Assinale a alternativa em que toda(s) a(s) afirmativa(s) está(ão) CORRETA(S):
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541191
Engenharia de Automação
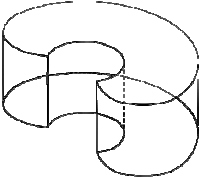
O robô manipulador que apresenta o volume de trabalho característico mostrado na figura abaixo pode ser cinematicamente classificado como:
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541190
Engenharia de Automação
Os ângulos Roll-Pitch-Yaw (RPY) são usados como representação mínima de orientação. Em certas posturas de um corpo rígido, porém, podem ocorrer singularidades de representação, ou seja, não é possível obter um único conjunto de ângulos RPY a partir da matriz de rotação. A única alternativa de representação de orientação que NÃO apresenta esse problema é:
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador Tecnologista - Metrologia em Informática |
Q267625
Engenharia de Automação
O controlador lógico programável (CLP) é utilizado nas plantas industriais para automatizar processos, por meio de um adequado sequenciamento das etapas associadas. O dispositivo é composto, basicamente, por unidades de entrada (digitais e analógicas), unidade de processamento e unidades de saída (digitais e analógicas), além de, possivelmente, outras unidades específicas. Um circuito que pode fazer parte do CLP é o WDT (watch dog timer), cuja função é monitorar