Questões de Concurso
Sobre controladores em engenharia de automação
Foram encontradas 22 questões
O diagrama de blocos a seguir representa uma planta de um motor de corrente contínua. Deseja-se
incluir um controlador que, ao adicionar um ganho, garante a estabilidade do sistema em malha fechada.
Determine a faixa de valores de ganho K, para que o sistema realimentado seja estável.
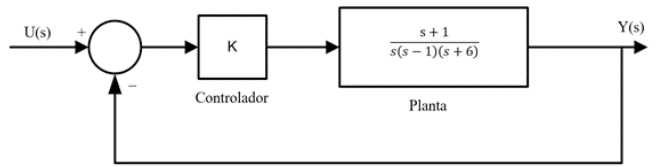
Fonte: IFSP, 2024
Um engenheiro de automação está desenvolvendo um sistema de controle para ajustar a temperatura de um forno industrial. Devido à complexidade das variações térmicas e às incertezas do processo, foi decidido utilizar um controlador fuzzy para otimizar o desempenho do sistema. Além disso, o engenheiro quer integrar técnicas de aprendizado de máquina para que o controlador possa se adaptar dinamicamente às condições do forno.
Com base nessa situação, qual das opções abaixo descreve corretamente uma vantagem da utilização de um controlador fuzzy adaptativo em comparação a um controlador fuzzy clássico?
Uma malha de controle de um processo é constituída de diversos elementos, os quais podem ser classificados segundo sua função na malha.
Assim, oJulgue o item seguinte, a respeito de elementos finais de controle e seus acessórios.
Em um processo industrial, elementos finais de controle são
utilizados na regulação do fluxo de fluidos de modo a se
manter variáveis como pressão, temperatura, fluxo, entre
outras, dentro de limites desejados.
Considere a FT de um controlador PID contínuo
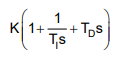
e T o período de amostragem empregado no ZOH/SOZ do conversor A/D conectado ao controlador.
Nesse contexto, a FT do PID discreto equivalente ao
contínuo é:
Considere a função de transferência de malha aberta na qual |z|>|p|
k(s + z) / s(s + p)(s2 + 2ps + p2 + 2p)
Considere a construção de uma malha fechada com esse sistema no seu ramo direto e realimentação unitária, e que k1 e k3 são ganhos para os quais a malha fechada possui polos reais iguais, e k2 é o ganho no qual a malha fechada passa a ser instável.
Considerando-se k1
< k2
< k3
, conclui-se que modos superamortecidos estarão presentes na resposta dinâmica
estável dessa malha fechada para
O sistema de malha fechada descrito acima é
Considere o Lugar Geométrico das Raizes (LGR) da Figura abaixo.

Considerando-se as informações acima, verifica-se que
K = 3 é o ganho
Considere que o circuito abaixo é formado por resistores.
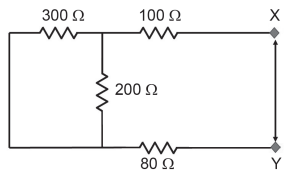
O valor, em Ω, da resistência equivalente vista entre os
terminais X e Y é
Entradas:
X0 = Botão retentivo de 2 posições, sendo, na posição 1, automático; na posição 2, manual.
X1 = Sensor S1
X2 = Sensor S2
X3 = Botão liga pulsante
X4 = Botão desliga pulsante
Nota: O botão retentivo na entrada X0 , na posição 1 (automático) emite um sinal na entrada. Se na posição 2 (manual) não emite sinal na entrada.
Saída: Y0 = Bomba d’água
O programa em Ladder instalado no CLP é o seguinte:
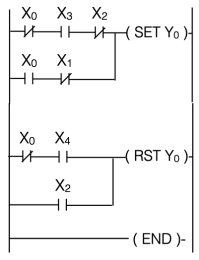
Analisando-se o programa, constata-se que o sistema em

Sabendo que x02 representa uma chave que ativa o desligamento de emergência da carga conectada na saída Q01 e interpretando o programa ilustrado acima, pode-se afirmar que a bobina virtual é utilizada nesse caso para:
I. Sua estabilidade global em relação a uma postura de equilíbrio é provada através do método de Lyapunov.
II. A técnica pode ser empregada para controle tanto no espaço das juntas quanto no espaço operacional.
III. Ela é uma técnica de controle centralizado, que considera o manipulador como um sistema de múltiplas entradas e múltiplas saídas, dinamicamente acoplado.
Assinale a alternativa em que toda(s) a(s) afirmativa(s) está(ão) CORRETA(S):

A sua lei de formação para
 pode ser expressa como
pode ser expressa como 
Aplicando a Transformada Z no sinal x(n), resulta a expressão
I – Nos sistemas de controle de processo por malha fechada, os sinais de saída não exercem nenhuma interferência sobre o controle do processo.
II – Os sinais de saída provenientes de um determinado processo são utilizados para ajustar o controle, tornando os processos mais estáveis.
III – Nos sistemas de controle por malha fechada, a estabilidade do sistema é uma variável irrelevante do processo.
Está correto o que se afirma em