Questões de Engenharia de Automação - Controladores para Concurso
Foram encontradas 20 questões
Ano: 2023
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2023 - Transpetro - Profissional Transpetro de Nível Superior - Junior: Ênfase 17: Engenharia de Automação |
Q2328588
Engenharia de Automação
Nas entradas e na saída de um Controlador Lógico Programável (CLP) estão conectados os seguintes componentes:
Entradas:
X0 = Botão retentivo de 2 posições, sendo, na posição 1, automático; na posição 2, manual.
X1 = Sensor S1
X2 = Sensor S2
X3 = Botão liga pulsante
X4 = Botão desliga pulsante
Nota: O botão retentivo na entrada X0 , na posição 1 (automático) emite um sinal na entrada. Se na posição 2 (manual) não emite sinal na entrada.
Saída: Y0 = Bomba d’água
O programa em Ladder instalado no CLP é o seguinte:
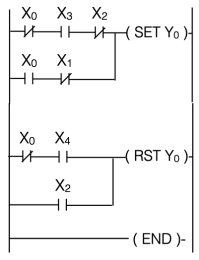
Analisando-se o programa, constata-se que o sistema em
Entradas:
X0 = Botão retentivo de 2 posições, sendo, na posição 1, automático; na posição 2, manual.
X1 = Sensor S1
X2 = Sensor S2
X3 = Botão liga pulsante
X4 = Botão desliga pulsante
Nota: O botão retentivo na entrada X0 , na posição 1 (automático) emite um sinal na entrada. Se na posição 2 (manual) não emite sinal na entrada.
Saída: Y0 = Bomba d’água
O programa em Ladder instalado no CLP é o seguinte:
Analisando-se o programa, constata-se que o sistema em
Q2182392
Engenharia de Automação
Controladores PID possuem ação proporcional, integral e derivativa. São frequentemente utilizados em sistemas de
automação de processos industriais. Em essência, controladores industriais comparam uma variável de saída em
relação a uma referência previamente definida. Diferenças entre elas alimentam o controlador, que busca igualá-las.
No contexto de controladores industriais PID, é correto afirmar:
Q2182389
Engenharia de Automação
Bobinas virtuais, também conhecidas como marcadores, são um importante recurso disponível em diversos
controladores lógicos programáveis. O diagrama Ladder a seguir ilustra a aplicação de uma delas, identificada
como M01. Neste diagrama, letras minúsculas e maiúsculas são utilizadas para diferenciar contatos normalmente
abertos de contatos normalmente fechados. 
Sabendo que x02 representa uma chave que ativa o desligamento de emergência da carga conectada na saída Q01 e interpretando o programa ilustrado acima, pode-se afirmar que a bobina virtual é utilizada nesse caso para:
Sabendo que x02 representa uma chave que ativa o desligamento de emergência da carga conectada na saída Q01 e interpretando o programa ilustrado acima, pode-se afirmar que a bobina virtual é utilizada nesse caso para:
Q1209459
Engenharia de Automação
Assinale a alternativa que NÃO apresenta uma característica relacionada aos controlados lógicos programáveis (CLP´s):
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541195
Engenharia de Automação
Em relação às afirmativas sobre o controle Proporcional-Derivativo (PD) com compensação da gravidade:
I. Sua estabilidade global em relação a uma postura de equilíbrio é provada através do método de Lyapunov.
II. A técnica pode ser empregada para controle tanto no espaço das juntas quanto no espaço operacional.
III. Ela é uma técnica de controle centralizado, que considera o manipulador como um sistema de múltiplas entradas e múltiplas saídas, dinamicamente acoplado.
Assinale a alternativa em que toda(s) a(s) afirmativa(s) está(ão) CORRETA(S):
I. Sua estabilidade global em relação a uma postura de equilíbrio é provada através do método de Lyapunov.
II. A técnica pode ser empregada para controle tanto no espaço das juntas quanto no espaço operacional.
III. Ela é uma técnica de controle centralizado, que considera o manipulador como um sistema de múltiplas entradas e múltiplas saídas, dinamicamente acoplado.
Assinale a alternativa em que toda(s) a(s) afirmativa(s) está(ão) CORRETA(S):