Questões de Concurso
Sobre controle de tensão e velocidade em engenharia elétrica
Foram encontradas 237 questões
(__)Sistemas de controle digital utilizam conversores A/D e D/A para realizar a interface entre sinais contínuos e digitais.
(__)O controle digital permite o ajuste de parâmetros em tempo real, sendo amplamente empregado em sistemas industriais modernos.
(__)A resposta de um sistema controlado digitalmente é sempre mais rápida que a de um sistema controlado analogicamente.
(__)Algoritmos de controle digital, como PID digital, são projetados para operar em tempo discreto, utilizando ciclos de amostragem definidos. A sequência está correta em:
O controlador proporcional integral derivativo (PID) é amplamente utilizado em processos industriais devido à sua versatilidade e relativa simplicidade. Ele é eficaz no controle de uma grande variedade de processos. O diagrama a seguir apresenta uma variante da estrutura clássica desse controlador. Nessa variante, são considerados os seguintes elementos:
G(s) é a função de transferência de planta;
r(s), u(s), d(s) e y(s) são os sinais de entrada da referência, saída do controlador, entrada da perturbação e saída do sistema, respectivamente;
Kp, Ti e Td são os parâmetros de ganho do controlador.
Figura 9
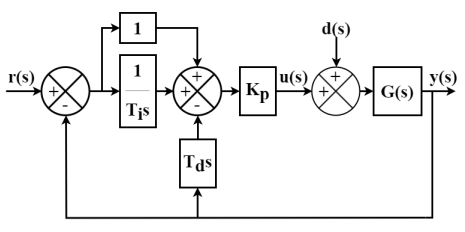
Fonte: O autor
A modificação tem o objetivo de minimizar grandes variações na saída quando ocorre
Com base nesse cenário, qual das alternativas a seguir descreve corretamente o impacto do atraso temporal e as possíveis consequências no controle de temperatura do forno?
Em relação ao intervalo diferencial, também conhecido como histerese, nesse tipo de controle, afirma-se que
O circuito ao lado faz parte de um sistema de controle proporcional integral derivativo (PID) analógico.
Figura 8

Fonte: O autor
Após analisar o circuito, é correto afirmar que se trata de um
Julgue o próximo item, relativo aos conceitos de eficiência energética.
Em sistemas de climatização, são fonte de melhoria de eficiência os dispositivos de controle de velocidade de motores que acionam ventiladores.

Sobre o tema, analise as assertivas abaixo:
I. Gráfico 1 representa partida direta. II. Gráfico 3 representa chave compensadora. III. Gráfico 2 representa estrela triângulo. IV. Gráfico 3 representa soft starter.
Quais estão corretas?


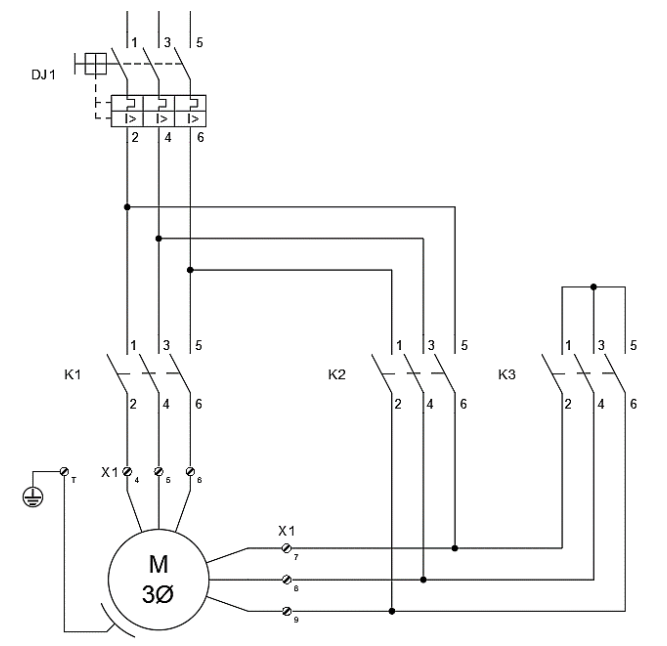
Sabendo que a motor-bomba M possui corrente nominal In = 21,8 A, assinale a alternativa que indica a corrente de operação aproximada nos contatores K1, K2 e K3, sabendo que o equipamento possui fator de serviço FS = 1,25.
Durante o desenvolvimento de um sistema
de controle de velocidade para motores, um engenheiro está utilizando um microcontrolador de 8
bits para gerar um sinal PWM (Pulse Width Modulation). Para verificar a precisão do sinal gerado,
ele utiliza um osciloscópio para analisar o sinal
PWM. A largura do pulso do sinal PWM é definida por um código de 8 bits e exibida conforme o
gráfico abaixo:
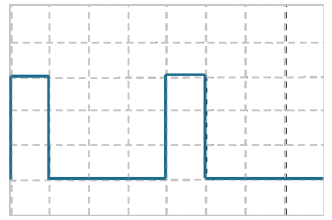
Fonte: IFSP, 2024
Sabendo que a base de tempo do osciloscópio está calibrada em 1 ms/DIV, a frequência do sinal PWM e o valor do código, em decimal, correspondente à largura do pulso valem, respectivamente:
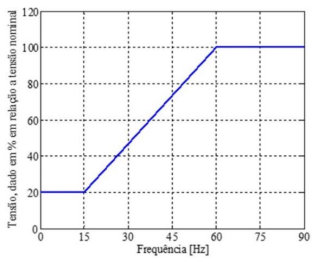
I. Na região de enfraquecimento de campo, a relação V/f possui valor constante com a variação da frequência.
PORQUE
II. Na região de operação para frequências abaixo da nominal do motor, a tensão de alimentação é menor que a tensão nominal com o intuito de evitar o aumento da corrente drenada pelo motor.
A respeito dessas asserções, assinale a opção correta.