O controlador proporcional integral derivativo (PID) é ampla...
Próximas questões
Com base no mesmo assunto
Ano: 2025
Banca:
IF Sul Rio-Grandense
Órgão:
IF Sul Rio-Grandense
Prova:
IF Sul Rio-Grandense - 2025 - IF Sul Rio-Grandense - Professor EBTT - Área 34: Controle e Processos Industriais III |
Q3233412
Engenharia Elétrica
O controlador proporcional integral derivativo (PID) é amplamente utilizado em processos industriais devido à sua versatilidade e relativa simplicidade. Ele é eficaz no controle de uma grande variedade de processos. O diagrama a seguir apresenta uma variante da estrutura clássica desse controlador. Nessa variante, são considerados os seguintes elementos:
G(s) é a função de transferência de planta;
r(s), u(s), d(s) e y(s) são os sinais de entrada da referência, saída do controlador, entrada da perturbação e saída do sistema, respectivamente;
Kp, Ti e Td são os parâmetros de ganho do controlador.
Figura 9
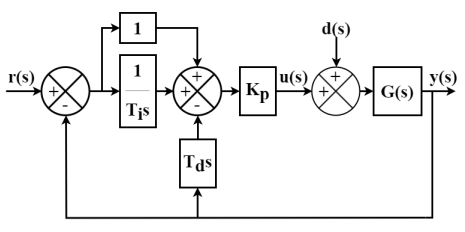
Fonte: O autor
A modificação tem o objetivo de minimizar grandes variações na saída quando ocorre