Questões de Concurso
Sobre filtros em engenharia eletrônica
Foram encontradas 345 questões
Ano: 2011
Banca:
CESPE / CEBRASPE
Órgão:
FUB
Prova:
CESPE - 2011 - FUB - Técnico de Laboratório - Física - Específicos |
Q108164
Engenharia Eletrônica
Texto associado
O amplificador operacional é um dos componentes eletrônicos
comumente empregado em instrumentação eletrônica. Com relação
às diversas aplicações de amplificadores operacionais, julgue os
seguintes itens.
comumente empregado em instrumentação eletrônica. Com relação
às diversas aplicações de amplificadores operacionais, julgue os
seguintes itens.
Tanto filtros ativos quanto filtros passivos fazem uso de resistores e capacitores, mas somente os filtros ativos utilizam componentes eletrônicos, como transistores e amplificadores operacionais.
Ano: 2011
Banca:
CESPE / CEBRASPE
Órgão:
TJ-ES
Prova:
CESPE - 2011 - TJ-ES - Analista Judiciário - Engenharia Elétrica - Específicos |
Q103759
Engenharia Eletrônica
Texto associado
Um sistema de controle é formado por componentes físicos,
conectados ou relacionados de maneira a comandar, dirigir ou
regular a si mesmo ou a outros sistemas. Os sistemas de controle
podem ser classificados, de forma geral, em sistemas de malha
aberta e de malha fechada e sistemas digitais e analógicos. Com
relação a esse assunto, julgue os itens subsequentes.
conectados ou relacionados de maneira a comandar, dirigir ou
regular a si mesmo ou a outros sistemas. Os sistemas de controle
podem ser classificados, de forma geral, em sistemas de malha
aberta e de malha fechada e sistemas digitais e analógicos. Com
relação a esse assunto, julgue os itens subsequentes.
Sabendo que os conversores podem ser classificados dentro da combinação analógico-digital-analógico, é correto afirmar que a figura abaixo ilustra um conversor analógico-digital (conversorA/D).
Q87393
Engenharia Eletrônica
No circuito da figura abaixo, 
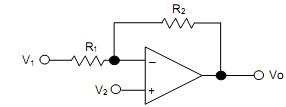
Sabendo-se que = 3 V e
= 3 V e  = 5 V, e supondo o AOP ideal alimentado com ±15 V, a tensão de saída Vo será
= 5 V, e supondo o AOP ideal alimentado com ±15 V, a tensão de saída Vo será
Sabendo-se que
= 3 V e = 5 V, e supondo o AOP ideal alimentado com ±15 V, a tensão de saída Vo será
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
EMBASA
Prova:
CESPE / CEBRASPE - 2010 - EMBASA - Engenheiro Eletricista |
Q1660677
Engenharia Eletrônica

O controle de temperatura é muito aplicado no setor industrial e civil. A figura acima mostra, de modo simplificado, o diagrama de um controlador de temperatura. Com base nesse diagrama, julgue o item a seguir.
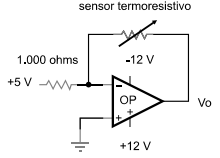
Considere o circuito a seguir, usado como um circuito condicionador de sinal de um sensor de temperatura termorresistivo, o qual segue a equação R = 5 + 2T, em que R é a resistência elétrica em ohms e T é a temperatura em graus celsius (ºC). Nesse caso, quando a temperatura medida pelo resistor é de 90 °C, a tensão de saída do circuito condicionador é de +0,925 V.
Q1237415
Engenharia Eletrônica
Considerando que, na digitalização de um sinal de áudio, seja utilizada quantização de 16 bits e frequência de amostragem de 50 kHz, e que a gravação digital resultante deva ser posteriormente processada, julgue o item subsequente.
Filtros FIR (finite impulse response) com fase linear podem ser usados para realizar a ênfase e a atenuação seletiva de componentes senoidais do sinal, sem que haja distorção de fase do sinal. Uma possível desvantagem desse procedimento é que esses filtros causam um atraso do sinal de saída em relação ao sinal de entrada.
Filtros FIR (finite impulse response) com fase linear podem ser usados para realizar a ênfase e a atenuação seletiva de componentes senoidais do sinal, sem que haja distorção de fase do sinal. Uma possível desvantagem desse procedimento é que esses filtros causam um atraso do sinal de saída em relação ao sinal de entrada.
Q1234417
Engenharia Eletrônica
As alternativas abaixo descrevem características que são comuns aos osciladores que utilizam amplificadores operacionais. Assinale a única alternativa incorreta:
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Engenharia Eletrônica |
Q569041
Engenharia Eletrônica
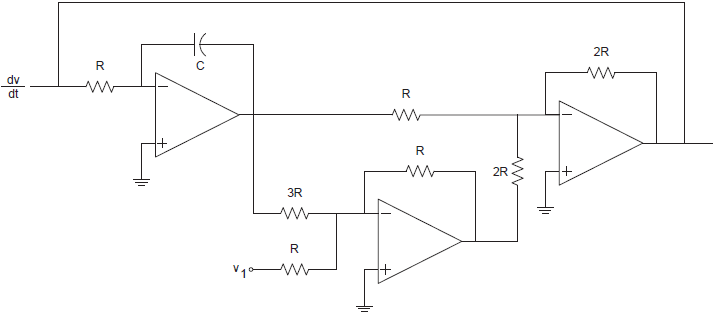
Considerando RC = 1, a equação matemática implementada pelo computador analógico da figura acima é:
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Engenharia Eletrônica |
Q569019
Engenharia Eletrônica
Dentre as alternativas seguintes, aquela que apresenta uma característica do amplificador operacional ideal é:
Ano: 2010
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2010 - Petrobras - Técnico de Telecomunicações Júnior |
Q189701
Engenharia Eletrônica

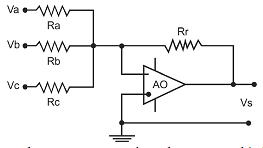
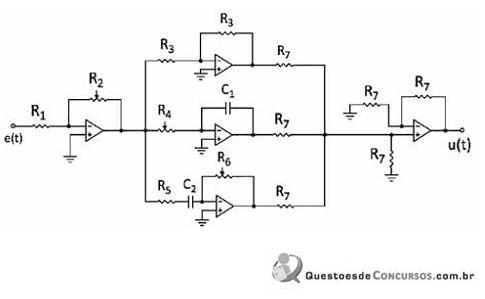
A figura acima apresenta um circuito eletrônico montado com dois amplificadores operacionais, considerados ideais. O circuito apresenta três entradas, todas alimentadas com tensão positiva igual a e. A expressão da tensão de saída é
Ano: 2010
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2010 - Petrobras - Técnico de Telecomunicações Júnior |
Q189677
Engenharia Eletrônica

O circuito da figura acima mostra um amplificador operacional ideal montado numa configuração experimental para operar como um conversor Digital–Analógico (D/A). As tensões VA, VB, VC e VD podem assumir tensões 0V (nível lógico 0) ou 16V (nível lógico 1).
A tensão VA corresponde ao bit mais significativo. Se a sequência de bits na entrada for 0110, a tensão de saída Vo, em volts, será
A tensão VA corresponde ao bit mais significativo. Se a sequência de bits na entrada for 0110, a tensão de saída Vo, em volts, será
Ano: 2010
Banca:
CESGRANRIO
Órgão:
PETROQUÍMICA SUAPE
Prova:
CESGRANRIO - 2010 - PETROQUÍMICA SUAPE - Técnico de Instrumentação Júnior |
Q185192
Engenharia Eletrônica

Na figura acima, observa-se um Amplificador Operacional em um circuito cuja configuração correta é
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
ABIN
Prova:
CESPE - 2010 - ABIN - Oficial Técnico de Inteligência – Área de Engenharia Elétrica |
Q184703
Engenharia Eletrônica
Texto associado
Estima-se, atualmente, que mais de 90% das malhas de controle
utilizadas em processos industriais operem com controladores
proporcional-integral-derivativo (PID). Acerca de controlador PID,
julgue os itens a seguir.
utilizadas em processos industriais operem com controladores
proporcional-integral-derivativo (PID). Acerca de controlador PID,
julgue os itens a seguir.
Uma possível implementação de um controlador PID pode ser corretamente realizada pelo circuito mostrado na figura abaixo, utilizando-se amplificadores operacionais, resistores, potenciômetros e capacitores. O ganho, a constante de tempo integral, a constante de tempo derivativo e o polo para eliminação de ganho em altas frequências são ajustados como  , respectivamente.
, respectivamente.
, respectivamente.
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador - Engenharia Eletrônica |
Q112738
Engenharia Eletrônica

Na figura acima, que ilustra a estrutura básica de um oscilador por deslocamento de fase, o símbolo indicado por –K é um amplificador com ganho negativo, com um limitador de amplitude. O módulo do ganho K é um pouco maior que o recíproco da amplitude, na frequência de oscilação, da função de transferência da malha RC, formada por três capacitores e três resistores.
Considerando-se as informações acima, é correto afirmar que ocorrerá a oscilação do circuito quando o deslocamento de fase provido pela malha RC for de
Considerando-se as informações acima, é correto afirmar que ocorrerá a oscilação do circuito quando o deslocamento de fase provido pela malha RC for de
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador - Engenharia Eletrônica |
Q112728
Engenharia Eletrônica
Um sistema de conversão analógico/digital de sinais contém um filtro anti-aliasing imediatamente antes da entrada do conversor, garantindo que a frequência máxima de uma componente significativa do sinal seja igual a 1.500 Hz. Nessa situação, a mínima frequência de amostragem para que o sinal amostrado possa ser posteriormente reconstruído é igual a
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador - Engenharia Eletrônica |
Q112717
Engenharia Eletrônica

No circuito ilustrado na figura acima, todos os resistores têm resistência de 100 k e todos os componentes são ideais. Nessa situação, se a tensão de entrada é
e todos os componentes são ideais. Nessa situação, se a tensão de entrada é  e a tensão de saída é
e a tensão de saída é  , é correto afirmar que o circuito se comporta como um
, é correto afirmar que o circuito se comporta como um
e todos os componentes são ideais. Nessa situação, se a tensão de entrada é e a tensão de saída é , é correto afirmar que o circuito se comporta como um
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador - Engenharia Eletrônica |
Q112715
Engenharia Eletrônica

Com relação ao amplificador de diferença ilustrado na figura, assinale a opção correta.
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador - Engenharia Eletrônica |
Q112712
Engenharia Eletrônica

No circuito elétrico acima, cujo sinal de entrada é indicado por vi a saída, indicada por v0, em volts, é igual a
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
TRT - 21ª Região (RN)
Prova:
CESPE - 2010 - TRT - 21ª Região (RN) - Analista Judiciário - Engenharia Elétrica |
Q110264
Engenharia Eletrônica
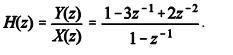
Julgue o próximo item, referente ao filtro digital definido pela relação
y(n) = y(n - 1) - y(n - 2) + x(n) - 3x(n -1) + 2x (n - 2).
A função de transferência  no domínio da transformada Z, é dada por
no domínio da transformada Z, é dada por
Ano: 2010
Banca:
FCC
Órgão:
TRT - 8ª Região (PA e AP)
Prova:
FCC - 2010 - TRT - 8ª Região (PA e AP) - Analista Judiciário - Engenharia Elétrica |
Q82759
Engenharia Eletrônica
Um filtro passa-baixas passivo formado por uma única célula RC, em que R = 120 ? e C = 470 nF, tem frequência de corte próxima de
Ano: 2010
Banca:
FCC
Órgão:
TRT - 8ª Região (PA e AP)
Prova:
FCC - 2010 - TRT - 8ª Região (PA e AP) - Analista Judiciário - Engenharia Elétrica |
Q82741
Engenharia Eletrônica
Considere as figuras I e II abaixo.
I. Sistema de controle proporcional-integral de velocidade de um motor DC:
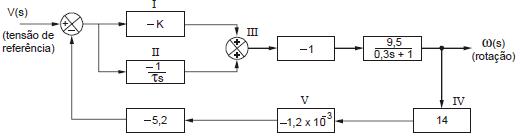
II. Circuito integrador:
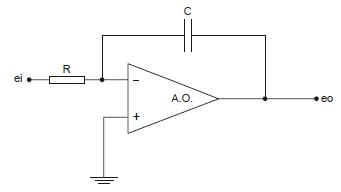
No sistema, o circuito integrador está representado pelo bloco
I. Sistema de controle proporcional-integral de velocidade de um motor DC:
II. Circuito integrador:
No sistema, o circuito integrador está representado pelo bloco