Questões de Concurso
Sobre lugar das raízes em engenharia eletrônica
Foram encontradas 34 questões
Ano: 2012
Banca:
CESPE / CEBRASPE
Órgão:
TJ-RO
Prova:
CESPE - 2012 - TJ-RO - Analista Judiciário - Engenharia Elétrica |
Q275763
Engenharia Eletrônica
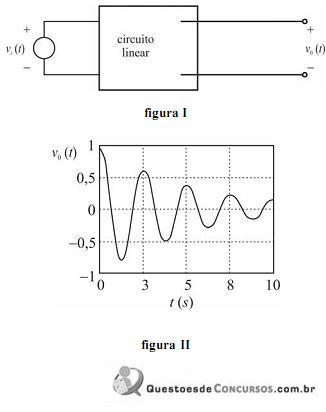
O circuito linear ilustrado na figura I acima pode ser interpretado como um quadripolo com uma porta de entrada e uma porta de saída. Quando a porta de entrada é excitada com uma tensão vi (t) impulsiva, observa-se, na porta de saída, a tensão v0(t), para t > 0, representada pelo sinal esboçado na figura II. Considerando que o circuito é de segunda ordem, é correto afirmar que, no plano complexo, o sistema tem
Ano: 2012
Banca:
CESPE / CEBRASPE
Órgão:
TRE-RJ
Prova:
CESPE / CEBRASPE - 2012 - TRE-RJ - Analista Judiciário - Engenharia Elétrica |
Q259600
Engenharia Eletrônica
Considere que o modelo de um sistema contínuo seja representado pela função de transferência
H(s) = K
(s+4)(s+2)
Utiliza-se a transformada bilinear, que permite o mapeamento do plano complexo s no plano complexo z, mediante a transformação s = (2⁄t) z-1⁄z+1 em que T é o período de amostragem, com valor convenientemente utilizado.
Com base nessas informações, julgue o item abaixo.
Os polos da função de transferência no plano z, correspondente ao sistema discreto obtido por meio da transformação do sistema contínuo, ficarão internos a um círculo unitário, porque o sistema contínuo é estável.
H(s) = K
(s+4)(s+2)
Utiliza-se a transformada bilinear, que permite o mapeamento do plano complexo s no plano complexo z, mediante a transformação s = (2⁄t) z-1⁄z+1 em que T é o período de amostragem, com valor convenientemente utilizado.
Com base nessas informações, julgue o item abaixo.
Os polos da função de transferência no plano z, correspondente ao sistema discreto obtido por meio da transformação do sistema contínuo, ficarão internos a um círculo unitário, porque o sistema contínuo é estável.
Ano: 2012
Banca:
CESPE / CEBRASPE
Órgão:
Banco da Amazônia
Prova:
CESPE - 2012 - Banco da Amazônia - Técnico Científico - Engenharia Elétrica |
Q257487
Engenharia Eletrônica
Texto associado
A respeito de teorias de controle, sistemas e processamento de sinais, julgue os itens a seguir.
A estabilidade de sistemas dinâmicos discretos é determinada pela posição dos polos da função de transferência desse sistema no plano complexo Z. Se todos os polos da função de transferência estiverem no interior do círculo unitário, o sistema é estável. No entanto, se houver algum polo da função de transferência fora do círculo unitário, o sistema é instável.
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobras - Engenheiro de Equipamento Júnior - Eletrônica |
Q183111
Engenharia Eletrônica
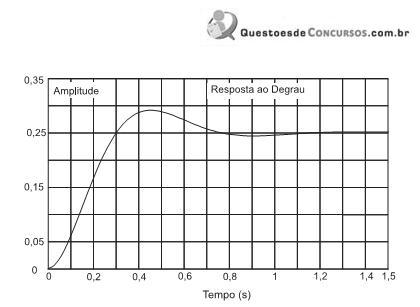
O gráfico da figura acima corresponde à resposta ao degrau unitário aplicado na entrada de um sistema de 2ª ordem, cuja função de transferência é G(s) = 16 /s2 + 8s + b. Com base nos dados da figura, os polos desse sistema são complexos, conjugados e iguais a
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobras - Engenheiro de Equipamento Júnior - Eletrônica |
Q183107
Engenharia Eletrônica
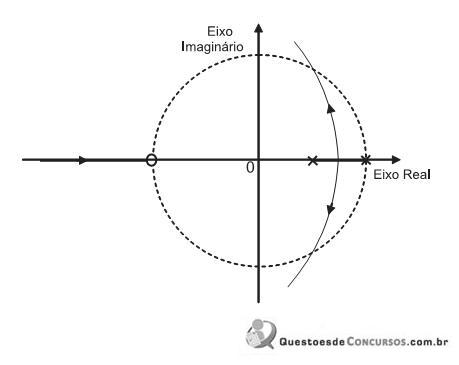
O modelo discreto de um sistema, em malha aberta, é representado pela função de transferência G(z) = K(z +1) / z2 -1,5z + 0,5. A figura acima mostra o esboço do lugar das raízes, no plano Z, para esse sistema, em malha fechada, com realimentação de saída e com o ganho variando no intervalo 0 ≤ k < + ∞ . O circulo unitário está traçado com linha pontilhada. O valor do ganho K, para que o sistema em malha fechada esteja no limiar da instabilidade, é
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobras - Engenheiro de Equipamento Júnior - Eletrônica |
Q183106
Engenharia Eletrônica
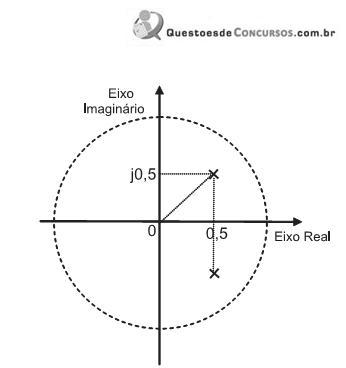
Um sistema discreto de 2ª ordem é composto por dois polos complexos, conjugados, que estão representados no diagrama de polos e zeros da figura acima. O círculo unitário está traçado com linha pontilhada. A resposta ao impulso desse sistema gera um sinal, discreto, senoidal amortecido e que oscila na frequência de 25π rad/s. Nessas condições, o período de amostragem, em ms, usado na discretização desse sistema, é
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Elétrica |
Q180140
Engenharia Eletrônica

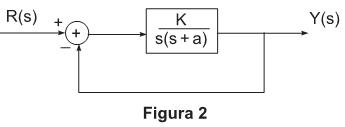
Considere o diagrama de realimentação mostrado na Figura 2, onde o ganho K varia positivamente até os polos alcançarem as posições mostradas na Figura 1. Os valores de a e K são, respectivamente,
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Elétrica |
Q180139
Engenharia Eletrônica
Com base no gráfico da Figura 1, esse sistema apresenta razão de amortecimento igual a
Ano: 2011
Banca:
CESPE / CEBRASPE
Órgão:
STM
Prova:
CESPE - 2011 - STM - Analista Judiciário - Engenharia Elétrica - Específicos |
Q107784
Engenharia Eletrônica
Texto associado
Os controladores PID contínuos no tempo e suas variantes são
utilizados como controladores de processos dinâmicos. Eles
propiciam ajustes no comportamento dos sistemas dinâmicos, tanto
na sua resposta transitória quanto na de regime permanente, para
certos tipos de entrada de referência. A respeito de características
desses controladores, quando ligados em série com o processo a ser
controlado, julgue os itens que se seguem.
utilizados como controladores de processos dinâmicos. Eles
propiciam ajustes no comportamento dos sistemas dinâmicos, tanto
na sua resposta transitória quanto na de regime permanente, para
certos tipos de entrada de referência. A respeito de características
desses controladores, quando ligados em série com o processo a ser
controlado, julgue os itens que se seguem.
Considere um sistema que, em malha aberta, possua a função de transferência G(s) =  em que A, B e C são constantes reais positivas. Se a esse sistema for adicionado um controle de ação proporcional com ganho positivo e uma realimentação negativa, será possível que a sua função de transferência, em malha fechada, tenha polos no semiplano direito do plano complexo s e, portanto, será possível que o sistema se torne instável em malha fechada.
em que A, B e C são constantes reais positivas. Se a esse sistema for adicionado um controle de ação proporcional com ganho positivo e uma realimentação negativa, será possível que a sua função de transferência, em malha fechada, tenha polos no semiplano direito do plano complexo s e, portanto, será possível que o sistema se torne instável em malha fechada.
em que A, B e C são constantes reais positivas. Se a esse sistema for adicionado um controle de ação proporcional com ganho positivo e uma realimentação negativa, será possível que a sua função de transferência, em malha fechada, tenha polos no semiplano direito do plano complexo s e, portanto, será possível que o sistema se torne instável em malha fechada.
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Engenharia Elétrica |
Q573201
Engenharia Eletrônica
Analise a função de transferência dada por 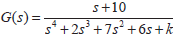 , na qual
, na qual  .
.
Assinale a alternativa que determine qual(is) valor(es) de k a função de transferência G(s) tem os pólos alocados no semi-plano da esquerda.
, na qual .Assinale a alternativa que determine qual(is) valor(es) de k a função de transferência G(s) tem os pólos alocados no semi-plano da esquerda.
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Engenharia Elétrica |
Q573199
Engenharia Eletrônica
Calcule as constantes reais p e q de forma que os pólos da função de transferência em malha fechada, conforme representado na figura, correspondam aos complexos conjugados −3± i .
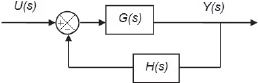
Dados:
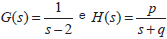
Assinale a alternativa correta.
Dados:
Assinale a alternativa correta.
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Engenharia Elétrica |
Q573192
Engenharia Eletrônica
Um sistema, cuja função de transferência é representada pela função (s2 + 5s + 6)/(s3 +15s2 +50s) possui:
Ano: 2008
Banca:
CESPE / CEBRASPE
Órgão:
HEMOBRÁS
Prova:
CESPE - 2008 - HEMOBRÁS - Especialista em Produção de Hemoderivados - Engenheiro Eletrônico |
Q153929
Engenharia Eletrônica
Texto associado

Com referência ao sistema dinâmico caracterizado pela função de
transferência G(s) mostrada acima, julgue os itens de 101 a 109.
Com referência ao sistema dinâmico caracterizado pela função de
transferência G(s) mostrada acima, julgue os itens de 101 a 109.
No diagrama de pólos e zeros desse sistema, observa-se que o zero está à direita do par de pólos complexos conjugados, no plano complexo.
Ano: 2008
Banca:
CESPE / CEBRASPE
Órgão:
HEMOBRÁS
Prova:
CESPE - 2008 - HEMOBRÁS - Especialista em Produção de Hemoderivados - Engenheiro Eletrônico |
Q153923
Engenharia Eletrônica
Texto associado
Com referência ao sistema dinâmico caracterizado pela função de
transferência G(s) mostrada acima, julgue os itens de 101 a 109.
Com referência ao sistema dinâmico caracterizado pela função de
transferência G(s) mostrada acima, julgue os itens de 101 a 109.
Os pólos desse sistema são complexos conjugados e possuem parte real dada por -7 rad/seg.