Questões de Engenharia Eletrônica para Concurso
Foram encontradas 3.780 questões
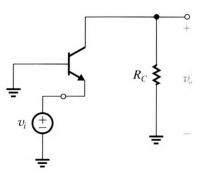
Assinale a opção que corresponde à configuração de amplificador com transistor apresentado na figura precedente.
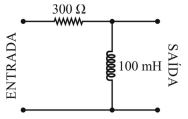
Considerando π = 3, assinale a opção que corresponde, respectivamente, ao tipo e à frequência de corte (fC) do filtro ilustrado na figura anterior.
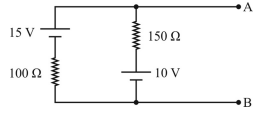
O circuito apresentado na figura precedente pode ser modelado pelo teorema de Thévenin como
Com base nessa situação hipotética, assinale a opção que corresponde ao instante, dado em minutos, contados desde o instante inicial, em que a massa de corante presente no tanque é igual a 30 kg.
Um poste possui altura e formato do paraboloide dado pela equação
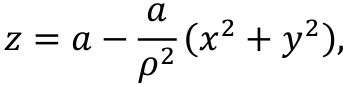
com raio da base  A densidade do poste é dada pela função
A densidade do poste é dada pela função
A partir dessas informações, conclui-se que o centro de massa do poste está no ponto
Um cabo flexível de alta tensão, preso entre as extremidades de dois postes de mesma altura e sujeito apenas à força de seu próprio peso, formará uma curva que é solução da equação diferencial  em que w e h são constantes.
em que w e h são constantes.
Nessa situação hipotética, a solução geral da equação diferencial dada é
Um filtro digital é caracterizado pela seguinte equação de diferenças:

em que x[n] é o sinal de entrada e y[n] é o sinal de saída.
Com base nessas informações, julgue o item a seguir.
O referido filtro é um sistema causal e estável.
Um filtro digital é caracterizado pela seguinte equação de diferenças:

em que x[n] é o sinal de entrada e y[n] é o sinal de saída.
Com base nessas informações, julgue o item a seguir.
O filtro em apreço é do tipo FIR (finite impulse response) e
sua resposta ao impulso é =
.
Um filtro digital é caracterizado pela seguinte equação de diferenças:
em que x[n] é o sinal de entrada e y[n] é o sinal de saída.
Com base nessas informações, julgue o item a seguir.
Em uma implantação, em tempo real, do referido filtro em
um processador digital de sinais, serão necessárias, no
mínimo, duas operações MAC (mutiply-accumulate) para se
calcular cada amostra do sinal de saída.
Um filtro digital é caracterizado pela seguinte equação de diferenças:
em que x[n] é o sinal de entrada e y[n] é o sinal de saída.
Com base nessas informações, julgue o item a seguir.
O filtro em questão consiste em um passa-baixas de
1.ª ordem, logo tem um zero em = 0 e polo em =
.
Um filtro digital é caracterizado pela seguinte equação de diferenças:
em que x[n] é o sinal de entrada e y[n] é o sinal de saída.
Com base nessas informações, julgue o item a seguir.
A função de transferência do referido filtro é  ,
com região de convergência
,
com região de convergência 
Considerem-se os cinco sinais de tempo discreto x1[n], x2[n], x3[n], x4[n] e x5[n].Considere-se, ainda, que esses sinais apresentem valores não nulos para 0 ≤ n < N e valores nulos para n < 0 ou n ≥ N. Considere-se, também, que a transformada de Fourier discreta de N pontos de cada um desses sinais seja, respectivamente: X1[k], X2[k], X[3]k, X4[k] e X5[k].
Com base nessas informações e sabendo que X3[k] = X1[k] ⋅ X2[k] e que X4[k] =  , em que
, em que  = , e, ainda, que x5[n] = 8x1[n]+ 9x2[n], julgue o item a seguir.
= , e, ainda, que x5[n] = 8x1[n]+ 9x2[n], julgue o item a seguir.
x5[k] = 8x1[k] + 9x2[k]
Considerem-se os cinco sinais de tempo discreto x1[n], x2[n], x3[n], x4[n] e x5[n].Considere-se, ainda, que esses sinais apresentem valores não nulos para 0 ≤ n < N e valores nulos para n < 0 ou n ≥ N. Considere-se, também, que a transformada de Fourier discreta de N pontos de cada um desses sinais seja, respectivamente: X1[k], X2[k], X[3]k, X4[k] e X5[k].
Com base nessas informações e sabendo que X3[k] = X1[k] ⋅ X2[k] e que X4[k] = , em que = , e, ainda, que x5[n] = 8x1[n]+ 9x2[n], julgue o item a seguir.
Se x1[k] for calculado usando-se a transformada rápida de
Fourier, então a complexidade computacional será reduzida
pela metade se comparada à complexidade computacional do
cálculo de x1[k] pela transformada de Fourier discreta
tradicional.
Considerem-se os cinco sinais de tempo discreto x1[n], x2[n], x3[n], x4[n] e x5[n].Considere-se, ainda, que esses sinais apresentem valores não nulos para 0 ≤ n < N e valores nulos para n < 0 ou n ≥ N. Considere-se, também, que a transformada de Fourier discreta de N pontos de cada um desses sinais seja, respectivamente: X1[k], X2[k], X[3]k, X4[k] e X5[k].
Com base nessas informações e sabendo que X3[k] = X1[k] ⋅ X2[k] e que X4[k] = , em que = , e, ainda, que x5[n] = 8x1[n]+ 9x2[n], julgue o item a seguir.
x4[n] corresponde a um deslocamento no tempo do sinal x1[n], isto é, x4 [n] = x1[n - m].
Considerem-se os cinco sinais de tempo discreto x1[n], x2[n], x3[n], x4[n] e x5[n].Considere-se, ainda, que esses sinais apresentem valores não nulos para 0 ≤ n < N e valores nulos para n < 0 ou n ≥ N. Considere-se, também, que a transformada de Fourier discreta de N pontos de cada um desses sinais seja, respectivamente: X1[k], X2[k], X[3]k, X4[k] e X5[k].
Com base nessas informações e sabendo que X3[k] = X1[k] ⋅ X2[k] e que X4[k] = , em que = , e, ainda,
que x5[n] = 8x1[n]+ 9x2[n], julgue o item a seguir.
x3[n] corresponde à convolução linear do sinal x1[n] com o
sinal x2[n], isto é, x3[n] = 