Questões de Concurso Sobre engenharia eletrônica
Foram encontradas 3.839 questões
Q571695
Engenharia Eletrônica
Analise as afirmativas abaixo a respeito das arquiteturas dos
processadores RISC (Redudec Instruction Set Computer) e CISC
(Complex Instruction Set Computer), considerando V para a(s)
verdadeira(s) e F para a(s) falsa(s):
( ) Os processadores CISC tornam o custo global do sistema muito elevado.
( ) Para os processadores RISC, as operações lógicas e aritméticas entre registradores possuem instruções de três endereços.
( ) Os processadores CISC melhoram a compactação do código.
A sequência correta é:
( ) Os processadores CISC tornam o custo global do sistema muito elevado.
( ) Para os processadores RISC, as operações lógicas e aritméticas entre registradores possuem instruções de três endereços.
( ) Os processadores CISC melhoram a compactação do código.
A sequência correta é:
Q571693
Engenharia Eletrônica
O tipo de uma rede de longa distância que permite o
compartilhamento do caminho de transmissão da rede, bem
como com seus custos, é a de comutação:
Q571690
Engenharia Eletrônica
A respeito dos tiristores, analise as afirmativas a seguir:
I - O SCR é um dispositivo que, quando polarizado diretamente, conduzirá mediante uma corrente no gate, sem a qual se manterá cortado.
II - O DIAC é um dispositivo que pode conduzir nos dois sentidos quando a tensão aplicada, desde que atinja a tensão de breakover (UBO).
III - O TRIAC é um dispositivo que permite controlar a potência em um circuito AC, com condução em um sentido.
Está correto somente o que se afirma em:
I - O SCR é um dispositivo que, quando polarizado diretamente, conduzirá mediante uma corrente no gate, sem a qual se manterá cortado.
II - O DIAC é um dispositivo que pode conduzir nos dois sentidos quando a tensão aplicada, desde que atinja a tensão de breakover (UBO).
III - O TRIAC é um dispositivo que permite controlar a potência em um circuito AC, com condução em um sentido.
Está correto somente o que se afirma em:
Q571688
Engenharia Eletrônica
Considere o circuito abaixo composto pelos circuitos 1 e 2 em
cascata.
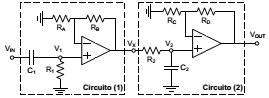
O circuito completo e os circuitos 1 e 2 são denominados, respectivamente, filtros:
O circuito completo e os circuitos 1 e 2 são denominados, respectivamente, filtros:
Q571687
Engenharia Eletrônica
Observe abaixo um circuito retificador de meia onda controlado, e as curvas de tensão U da fonte e V na carga RL. Os ângulos α e β são, respectivamente, de disparo e de avanço.
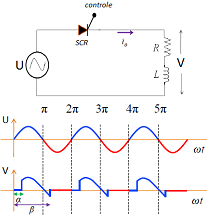
O valor eficaz de U é igual a 220 V e os ângulos α e β são,respectivamente, iguais a 30° e 210°. A tensão eficaz de V é:
O valor eficaz de U é igual a 220 V e os ângulos α e β são,respectivamente, iguais a 30° e 210°. A tensão eficaz de V é:
Q571686
Engenharia Eletrônica
Um circuito lógico e sua tabela verdade são apresentados abaixo:
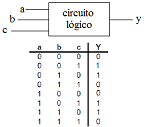
Esse circuito possui entradas a, b e c. A saída y desse circuito é:
Esse circuito possui entradas a, b e c. A saída y desse circuito é:
Q571685
Engenharia Eletrônica
Considere o circuito digital abaixo:
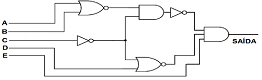
Para que a saída seja igual à unidade, a sequência de entradas A, B, C, D e E deve ser:
Para que a saída seja igual à unidade, a sequência de entradas A, B, C, D e E deve ser:
Q571684
Engenharia Eletrônica
Em um computador, o armazenamento de dados e instruções
que são acessados frequentemente é realizado por um elemento
físico da memória com característica volátil. Trata-se de
memória:
Q571683
Engenharia Eletrônica
Considere a seguinte soma: 46 (base decimal) + 2 E (base
hexadecimal). O resultado na base binária é:
Q571682
Engenharia Eletrônica
A figura abaixo mostra a polarização de um transistor bipolar de
junção e a reta de carga que representa essa polarização no
ponto P.
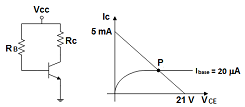
A tensão base-emissor do transistor é igual a 1,0 V. Os valores dos resistores RB e RC são iguais a:
A tensão base-emissor do transistor é igual a 1,0 V. Os valores dos resistores RB e RC são iguais a:
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Engenharia Mecânica |
Q569173
Engenharia Eletrônica
A respeito dos controladores PID, pode-se dizer que:
I. Usualmente, as perturbações no carregamento são de baixa frequência, já os sensores de ponta são de alta frequência.
II. O controle PID geralmente traz bons resultados se a planta dinâmica dominante é de segunda ordem.
III. A antecipação da ação derivativa reage à taxa rápida de variação do erro.
Assinale:
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Engenharia Eletrônica |
Q569041
Engenharia Eletrônica
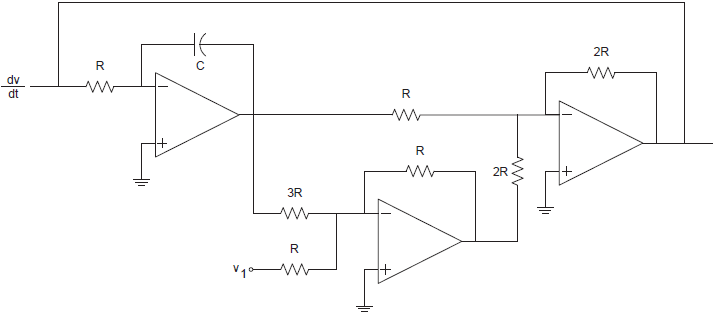
Considerando RC = 1, a equação matemática implementada pelo computador analógico da figura acima é:
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Engenharia Eletrônica |
Q569040
Engenharia Eletrônica
Texto associado
O uso de controladores lógico programáveis na automação industrial é amplo e diversificado. Para a programação e análise destes controladores, a representação gráfica do comportamento dos comandos aplicados às máquinas e aos equipamentos industriais mais complexos é indispensável. Neste contexto, o Grafcet se destaca, empregando uma simbologia com etapas, transições, ações e receptividade das variáveis de entrada e saída. Há padrões definidos para construção utilizando o Grafcet que devem ser seguidos para padronização e lógica da representação feita.
Na figura, as etapas são caracterizadas pela letra A, as transições pela letra f e as ações pela letra M.

Na figura, as etapas são caracterizadas pela letra A, as transições pela letra f e as ações pela letra M.
Das sequências de comandos em Grafcet aqui apresentadas, estão corretamente construídas apenas a(s) que compõe(m) o diagrama(s):
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Engenharia Eletrônica |
Q569039
Engenharia Eletrônica
Texto associado
Uma planta industrial é composta por dois equipamentos que possuem modelos lineares ideais G1(s) e G2(s).
A montagem é feita de forma que a saída de G1(s) é a entrada de G2(s), conforme ilustra a figura.

Para as funções de transferências definidas por afirma-se:
afirma-se:
I. Para uma entrada R(s) limitada, a saída Y(s) também é limitada (BIBO estabilidade)
PORQUE
II. O produto de G1(s) por G2(s) resulta em uma função de transferência estável.
A montagem é feita de forma que a saída de G1(s) é a entrada de G2(s), conforme ilustra a figura.
Para as funções de transferências definidas por
afirma-se:I. Para uma entrada R(s) limitada, a saída Y(s) também é limitada (BIBO estabilidade)
PORQUE
II. O produto de G1(s) por G2(s) resulta em uma função de transferência estável.
Assinale:
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Engenharia Eletrônica |
Q569038
Engenharia Eletrônica
Texto associado
Para uma representação discreta (ou a tempo discreto) no espaço de estados, um sistema linear S1 é definido por x(1+ k ) = Ax(k) + Bu(k) e y(k) = Cx(k) + Du(k) , em que: o vetor de estado x∈ ; o vetor de saída y∈
; o vetor de saída y∈ ; o vetor de entrada u∈
; o vetor de entrada u∈ ; k ∈
; k ∈ (incremento discreto); as matrizes são invariantes no tempo, têm dimensões compatíveis com os vetores e são formadas por números reais.
(incremento discreto); as matrizes são invariantes no tempo, têm dimensões compatíveis com os vetores e são formadas por números reais.
Por meio de uma transformada de similaridade de S1, obtida utilizando uma matriz T∈ n×n | ∃T−1 , define-se o sistema S2.
n×n | ∃T−1 , define-se o sistema S2.
; o vetor de saída y∈ ; o vetor de entrada u∈; k ∈ (incremento discreto); as matrizes são invariantes no tempo, têm dimensões compatíveis com os vetores e são formadas por números reais.Por meio de uma transformada de similaridade de S1, obtida utilizando uma matriz T∈
n×n | ∃T−1 , define-se o sistema S2.
Empregando as denominações de matriz de dinâmica (A ), matriz de entradas (B ), matriz de saída (C) e matriz de transmissão direta (D), para T ≠ I (a matriz de transformação não é a matriz identidade), ao se comparar as propriedades, as matrizes e os vetores dos dois sistemas, verifica-se que:
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Engenharia Eletrônica |
Q569037
Engenharia Eletrônica
Texto associado

Os Controladores Lógicos Programáveis (CLPs) substituíram elementos e componentes eletro-eletrônicos de acionamento e são fundamentais na automação moderna. Como uma linguagem de programação similar à de diagramas lógicos de acionamento, desenvolvidos por eletrotécnicos e profissionais da área de controle, os CLPs são empregados em larga escala na indústria.
A figura a seguir apresenta, em condições ideais de funcionamento, uma programação em linguagem de contatos (ou LADDER) em que o contato normalmente aberto B é energizado por uma botoeira (por cerca de um segundo) e os contatos definidos como D estão associados a uma chave.
No esquema: T0 e T1 são temporizadores e estão associados aos tempos de t1 s e t2 s, com t2 > t1; e M0, M1 e M2 são motores. O contato D está desligado e só é acionado após os três motores estarem em funcionamento.
A figura a seguir apresenta, em condições ideais de funcionamento, uma programação em linguagem de contatos (ou LADDER) em que o contato normalmente aberto B é energizado por uma botoeira (por cerca de um segundo) e os contatos definidos como D estão associados a uma chave.
No esquema: T0 e T1 são temporizadores e estão associados aos tempos de t1 s e t2 s, com t2 > t1; e M0, M1 e M2 são motores. O contato D está desligado e só é acionado após os três motores estarem em funcionamento.
Desta forma, pode-se afirmar que:
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Engenharia Eletrônica |
Q569036
Engenharia Eletrônica
Texto associado
No processo de automação industrial, alguns fatores e componentes merecem destacada consideração e análise. Em particular, os acionadores para motores de indução a corrente alternada (CA), por controlar as variáveis elétricas – tensão e corrente – nos enrolamentos do estator do motor, permitem o controle desses motores de forma a obter o desempenho desejado (supondo que o comportamento é viável tecnicamente), com ajuste de torque, velocidade e/ou posição.
Os acionadores funcionam baseados na variação da tensão, corrente, frequência ou de uma combinação destas.
Os acionadores funcionam baseados na variação da tensão, corrente, frequência ou de uma combinação destas.
Em relação aos tipos de acionadores, suas características e empregos, assinale a afirmativa correta.
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Engenharia Eletrônica |
Q569035
Engenharia Eletrônica
Texto associado
ENTITY entidade IS
PORT (a, b, c: IN bit;
d, e: OUT bit);
END entidade;
ARCHITECTURE arquitetura OF entidade IS
BEGIN
PROCESS (a, b, c)
BEGIN
IF (c = '1') THEN
d <= a XOR b;
e <= a AND b;
ELSE
d <= '0';
e <= '0';
END PROCESS;
END arquitetura;
PORT (a, b, c: IN bit;
d, e: OUT bit);
END entidade;
ARCHITECTURE arquitetura OF entidade IS
BEGIN
PROCESS (a, b, c)
BEGIN
IF (c = '1') THEN
d <= a XOR b;
e <= a AND b;
ELSE
d <= '0';
e <= '0';
END PROCESS;
END arquitetura;
O código VHDL mostrado acima descreve a seguinte operação lógica:
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Engenharia Eletrônica |
Q569034
Engenharia Eletrônica
Texto associado
Para representações em espaço de estado algumas propriedades são importantes e definem as possibilidades de manipulação de uma planta física. A controlabilidade e a observabilidade de um sistema são duas das propriedades fundamentais para a síntese de controladores.
Para o sistema linear contínuo (t ) = Ax(t) + Bu(t) e y(t) = Cx(t) + Du(t) , definido pelas matrizes:
(t ) = Ax(t) + Bu(t) e y(t) = Cx(t) + Du(t) , definido pelas matrizes:
A = ; B =
; B =  ; C = [ f g]; D = 0 ; e {a,b, c, d, f , g}∈
; C = [ f g]; D = 0 ; e {a,b, c, d, f , g}∈ .
.
Para o sistema linear contínuo
(t ) = Ax(t) + Bu(t) e y(t) = Cx(t) + Du(t) , definido pelas matrizes: A =
; B = ; C = [ f g]; D = 0 ; e {a,b, c, d, f , g}∈.
Assinale a afirmativa correta:
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Engenharia Eletrônica |
Q569033
Engenharia Eletrônica
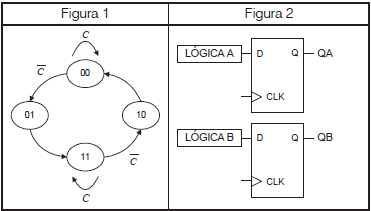
A Figura 1, acima, mostra um diagrama de quatro estados definidos pelos bits B e A, sendo B o mais significativo, e pelo bit de controle C.
A Figura 2, por sua vez, mostra uma implementação síncrona desse diagrama de estados com o uso de flip-flops D e das lógicas A e B.
Estas lógicas devem ser, respectivamente: