Questões de Concurso Sobre engenharia eletrônica
Foram encontradas 3.837 questões
No filtro abaixo, composto por elementos RC ideais, na frequência de corte a tensão de saída do filtro representa aproximadamente 71% da tensão de entrada.
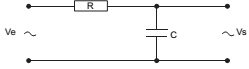
Nas condições citadas, o ganho de tensão do filtro é, em dB,
Considere as duas situações, abaixo, referentes a DPS − dispositivo de proteção contra surtos:
1. DPS ensaiado com onda de corrente nominal de descarga de 8/20 μs.
2. DPS ensaiado com onda de corrente de impulso de 10/350 μs. Para efeito de classificação, tratam-se de DPSs:

Considerando o sistema de controle ilustrado na figura apresentada,
em que C(s) representa um controlador, julgue o próximo item com referência à análise de estabilidade.
Considerando o sistema de controle ilustrado na figura apresentada,
em que C(s) representa um controlador, julgue o próximo item com referência à análise de estabilidade.
Considerando o sistema de controle ilustrado na figura apresentada,
em que C(s) representa um controlador, julgue o próximo item com referência à análise de estabilidade.
Em comparação com a modulação FM, a modulação AM apresenta maior robustez à interferência do ruído e requer maior banda para a transmissão.
Ao se modular o sinal em amplitude, será possível aumentar o desempenho do sistema suprimindo-se a portadora ou a transmissão de uma das metades da banda do sinal.
Para se obter uma taxa de transmissão de 64 kbps, será necessário utilizar uma codificação de 8 bits do sinal.
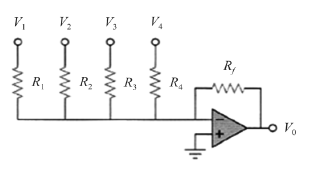
A figura apresentada ilustra um conversor digital-analógico em que as entradas de V1 a V4 podem assumir apenas os valores 0 V ou 1 V. Considerando que a entrada V1 represente o bit mais significativo, V4 represente o bit menos significativo e Vo represente a tensão de saída, julgue o seguinte item.
Se R1 = R2 = R3 = R4 = Rf
= 15 kΩ , então a entrada 0010 gerará
uma tensão de saída igual a -4 V.

A figura acima apresenta um diagrama de blocos que representa uma planta industrial. Nessa figura, U(s) corresponde à transformada de Laplace do sinal de entrada ut, e Y(s) corresponde à transformada de Laplace do sinal de saída y(t), em que t é o tempo em segundos.
A figura acima apresenta um diagrama de blocos que representa uma planta industrial. Nessa figura, U(s) corresponde à transformada de Laplace do sinal de entrada ut, e Y(s) corresponde à transformada de Laplace do sinal de saída y(t), em que t é o tempo em segundos.
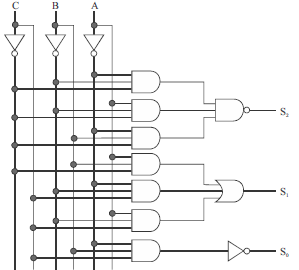
A figura acima ilustra um circuito que utiliza uma parte de um decodificador de 3 para 8, que é um circuito utilizado na implementação de microcomputadores, em associação com algumas portas lógicas adicionais. Se as entradas binárias forem C = 1, B = 0 e A = 1, então os valores digitais das saídas S2, S1 e S0 serão, respectivamente,