Questões de Concurso Sobre engenharia eletrônica
Foram encontradas 3.837 questões
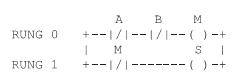
O programa em Ladder acima aciona a bobina S, obedecendo às condições dos contatos A e B. A expressão lógica correspondente ao programa é
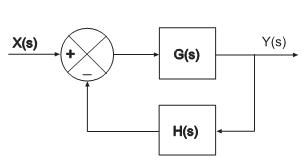
A figura acima representa um diagrama de blocos. A esse respeito, a função de transferência de malha fechada [Y(S)/X(S)] correspondente a esse diagrama é
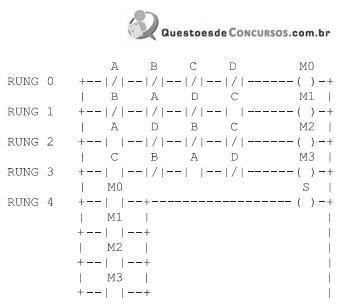
O programa em Ladder acima aciona a bobina S, obedecendo às condições dos contatos A, B, C e D. A simplificação desse programa está em




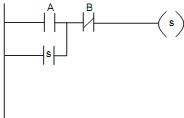
Com a mudança de estado do bit A, a função do bit S, em paralelo com o bit A, é
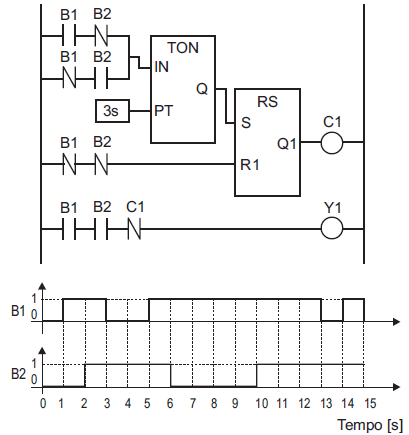
No programa LADDER, da figura acima, B1, B2, C1 e Y1 são variáveis booleanas na memória de um CLP; TON é um temporizador com atraso no acionamento, com tempo especificado em segundos; e RS é um bloco de função biestável com reset dominante.
Em t = 0 s, todas as variáveis booleanas estão em nível lógico 0, o temporizador está zerado e a saída do bloco RS também está zerada. Sabendo-se que B1 e B2 evoluem conforme indicado nos gráficos da figura e, desprezando- se o tempo de varredura do CLP, o tempo acumulado, em segundos, em que Y1 permanece em nível lógico 1, no intervalo de 0 s a 15 s, é
Um microcontrolador possui uma porta bidirecional de 8 bits, chamada P2, acionada por drivers em coletor aberto. Sejam 3 possíveis sequências de código para ler o valor da porta P2 e colocá-lo no acumulador A as apresentadas abaixo.
Está(ão) correta(s) APENAS a(s) sequência(s)
Corresponde(m) ao sistema modelado acima a(s) característica(s)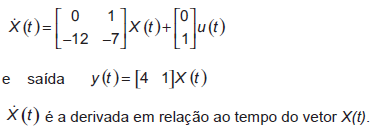
Tal sistema pode se caracterizar por ser
I - controlável.
II - observável.
III - estável.
Corresponde(m) ao sistema modelado acima a(s)
característica(s)
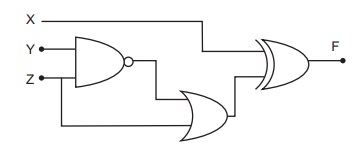
O circuito lógico combinacional mostrado na figura acima tem, como entradas, as variáveis lógicas X, Y e Z e, como saída, a variável F. A expressão simplificada da função booleana F é
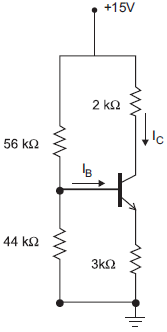
O circuito eletrônico da figura acima mostra um transistor NPN polarizado e operando na região ativa. O transistor tem, nessas condições, um ß = 100 e VBE = 0,6 V. O valor aproximado da corrente de coletor IC, em mA, é

A figura acima apresenta um circuito que permite a conversão
CA-CC de tensão por meio de uma ponte de tiristores SCR (T1 a
T6). A conversão é necessária para alimentação de uma carga em
corrente contínua a partir de uma fonte de alimentação CA trifásica.
Com base nessas informações, julgue os itens subsequentes.
 (t) a tensão instantânea sobre a carga, é correto afirmar que a tensão média nessa carga pode assumir valores positivos ou valores negativos, de acordo com o ângulo de disparo dos tiristores.
(t) a tensão instantânea sobre a carga, é correto afirmar que a tensão média nessa carga pode assumir valores positivos ou valores negativos, de acordo com o ângulo de disparo dos tiristores.