Questões de Concurso Sobre engenharia eletrônica
Foram encontradas 3.922 questões
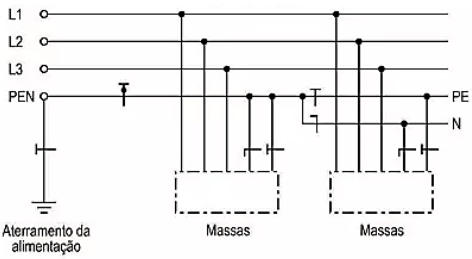
I. O método das malhas é apropriado para proteger superfícies laterais planas contra descargas atmosféricas laterais.
II. Se o declive do telhado exceder 1/10, condutores paralelos, em vez de em malha, podem ser usados, adotando a distância entre os condutores não maior que a largura de malha exigida.
III. O conjunto de condutores do subsistema de captação deve ser construído de tal modo que a corrente elétrica da descarga atmosférica sempre encontre pelo menos duas rotas condutoras distintas para o subsistema de aterramento.
IV. O método das malhas é apropriado para telhados horizontais e inclinados sem curvatura.
Polarizar a base produz um valor fixo na corrente da base, enquanto polarizar o emissor produz uma corrente fixa no emissor (1ª parte). A polarização da base é mais aplicada em circuitos amplificadores, enquanto a polarização do emissor é predominante em circuitos de chaveamento (2ª parte). Quando um transistor está saturado, um aumento na corrente da base produz uma corrente menor no coletor (3ª parte).
Quais partes estão corretas?
• De – diâmetro externo do eletroduto, em mm.
• ∆De – variação do diâmetro externo, em mm.
• Ep – espessura da parede do eletroduto, em mm.
Considerando:
• De = 62,5 mm
• ∆De = 0,7 mm
• Ep = 2,5 mm
Qual é a área útil compatível de um eletroduto de PVC rígido, tamanho 60, classe B?
Assinale a alternativa que preenche, correta e respectivamente, as lacunas do trecho acima.
1. O efeito termoelétrico é utilizado para a medição da temperatura.
2. O efeito Josephson é utilizado para a medição da diferença de potencial elétrico.
3. O efeito Doppler é utilizado para a medição da velocidade.
4. O efeito Raman é utilizado para a medição do número de ondas de vibrações moleculares.
5. O efeito fotoelétrico é utilizado para a medição da quantidade de elétrons incidentes em uma superfície.
O resultado da somatória dos números correspondentes às afirmações corretas é:
Coluna 1
1. Transformador da unidade de geração.
2. Transformador de subestação.
3. Transformador de distribuição.
4. Transformador de potencial.
5. Transformador com mudança de derivação sob carga.
Coluna 2
( ) Responsável por abaixar a tensão do nível de transmissão para o nível de distribuição (de 2,3 a 34,5 kV).
( ) Projetado para trabalhar com correntes menores, tem como finalidade tomar uma amostra de alta tensão e produzir uma baixa tensão secundária que lhe é diretamente proporcional.
( ) Tem a capacidade de alterar suas derivações enquanto está energizado, é formado por circuitos internos de sensoriamento de tensão que automaticamente trocam de derivação para manter a tensão do sistema constante.
( ) Conectado à saída de uma unidade geradora e usado para elevar a tensão até o nível de transmissão (110+ kV).
( ) Responsável por abaixar a tensão de distribuição para o nível final ou de entrega (110, 127, 220 V, etc.).
A ordem correta de preenchimento dos parênteses, de cima para baixo, é:
• Perdas no cobre do estator = Pcu1 = 1189 W.
• Perdas no cobre do rotor = Pcu2 = 1376 W.
• Perdas no núcleo do estator = Pe = 567 W.
• Perdas rotacionais (atrito, ventilação e perdas no ferro devido à rotação) = Prot = 650 W.
Assinale a alternativa que apresenta a potência transferida através do entreferro.
Coluna 1
1. Tensão de linha.
2. Sequência de fase.
3. Gerador CA conectado em ∆.
4. Gerador trifásico conectado em Y.
5. Tensão de fase.
Coluna 2
( ) Tensão entre uma linha e um neutro de um gerador conectado em Y ou tensão entre duas linhas de um gerador em ∆.
( ) Os três condutores usados para conectar os terminais à carga do circuito são chamados de linhas.
( ) Ordem na qual as tensões senoidais produzidas por um gerador polifásico afetam a carga na qual estão conectadas.
( ) As tensões de fase e de linha são equivalentes e têm o mesmo valor que as tensões induzidas nos enrolamentos.
( ) Diferença de potencial que existe entre as linhas de um sistema monofásico ou polifásico.
A ordem correta de preenchimento dos parênteses, de cima para baixo, é:
( ) Condutores de menor diâmetro podem ser usados para transmitir a mesma potência à mesma tensão, o que reduz a quantidade de cobre necessário (normalmente, cerca de 25% a menos) e, consequentemente, os custos de fabricação e manutenção das linhas.
( ) Linhas mais robustas são mais fáceis de instalar e suas torres de sustentação podem ser mais delgadas e mais espaçadas.
( ) Equipamentos e motores trifásicos apresentam melhores características de partida e operação que os sistemas monofásicos, pois a transferência de potência da fonte para a carga nos sistemas monofásicos está menos sujeita à flutuação do que nos sistemas trifásicos.
( ) Em geral, a grande maioria dos motores de grande porte é trifásica porque a partida não precisa de um projeto especial ou de circuitos externos adicionais.
A ordem correta de preenchimento dos parênteses, de cima para baixo, é:
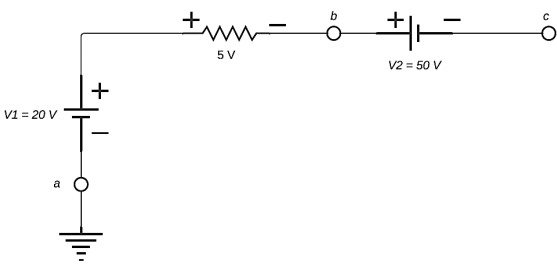
Quais são as medidas para as tensões Vb, Vc e Vac, respectivamente?
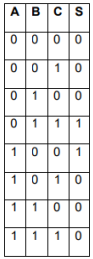
É CORRETO afirmar que a expressão que descreve a função S é:
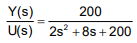
Ao ser aplicado um Impulso Unitário na entrada desse sistema, o sinal de saída oscilará na forma de uma senoide exponencialmente amortecida.
Dessa forma, pelo exposto acima, a constante conhecida como Razão de Amortecimento desse sistema vale
O sistema estrutural de identificação por radiofrequência (RFID) típico inclui três componentes básicos.
Tais componentes estão adequadamente listados a seguir:
Um circuito elétrico é composto por uma fonte de tensão vF(t) que alimenta três componentes considerados ideais: um resistor de resistência R, um capacitor de capacitância C e um indutor de indutância L, todos associados em série. Fechando o circuito da fonte sobre esses três componentes ligados em série, uma corrente i(t) vai circular. A dinâmica desse sistema é regida por uma equação diferencial, obtida pela lei de Kirchoff, que relaciona a soma das tensões nesta malha: vF(t) = vR(t) + vC(t) + vL (t).
As relações entre as tensões e a corrente da malha são:

Com base nos dados, considerando-se todas as condições iniciais nulas, qual é a expressão da Função de Transferência,
no domínio de Laplace, que liga a corrente elétrica de saída com a tensão da fonte de alimentação, ou seja, a expressão
de 
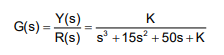
Esse modelo relaciona a saída Y(s) do sistema, com a entrada de referência R(s) e apresenta, no domínio do tempo, o sinal de saída y(t) em função do sinal de entrada r(t).
Variando-se positivamente o ganho K, chega-se a um determinado valor que provoca uma oscilação pura no sinal de saída y(t), ou seja, o sistema, em MF, passa a ter dois polos imaginários puros.
Qual é o valor do ganho K para obtenção dessa oscilação senoidal com valor de pico constante?