Questões de Concurso Sobre engenharia eletrônica
Foram encontradas 3.972 questões

Tendo em vista que os dispositivos eletrônicos podem ser utilizados para a construção de filtros, existindo, para tanto, diversas topologias disponíveis, de acordo com as frequências que se deseje selecionar, julgue o item que se segue, a respeito dos circuitos precedentemente apresentados.
Os filtros A e B são ativos.
Julgue o item que se segue, acerca de domínio do tempo e da frequência.
A filtragem de um sinal no domínio das frequências
corresponde a uma convolução entre o sinal de informação
e o filtro.
Julgue o item que se segue, acerca de domínio do tempo e da frequência.
Ao multiplicar-se um sinal de informação por um sinal
senoidal, no domínio do tempo, translada-se seu espectro de
frequências.
Julgue o item que se segue, acerca de domínio do tempo e da frequência.
Forma de onda é a representação gráfica das amplitudes
em função da frequência.
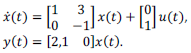
As variáveis de entrada, de saída e o vetor de estado são, respectivamente, u(t), y(t) e x(t) tendo componentes reais e de dimensões compatíveis com as matrizes do sistema.
Utilizando-se uma realimentação negativa, com o vetor x(t) pré multiplicada pela matriz de ganho K = [k1 k2] ∈ R1x2, deseja-se um sistema subamortecido e assintoticamente estável.
Esse desempenho é obtido para os reais K1 e K2 , se
Analise as citações que um deles fez para o outro.
I. Se um sistema linear é próprio, mas não é estritamente próprio, então sua representação em Espaço de Estados tem a matriz de transmissão direta (D) nula. II. A representação em Espaço de Estados na forma canônica controlável de um sistema de segunda ordem cuja função de transferência tem o numerador igual ao real k, tem a matriz de saída dada por C = [k 0]. III. Um sistema discreto representado em Espaço de Estados é assintoticamente estável se a norma da matriz de estado (A) é menor que 1.
Sobre essas citações, está correto o que se afirma em
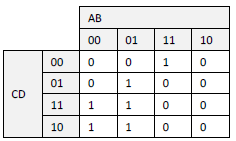
A expressão simplificada do mapa de Veitch Karnaugh, mostrado acima, é
A figura a seguir apresenta a tabela verdade de duas portas lógicas.
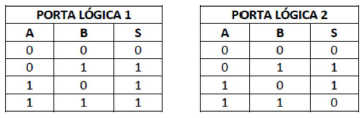
Considere que:
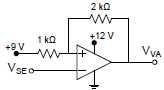
• VVA aciona a válvula de entrada de fluído, que permite a entrada de fluído no reservatório quando a tensão em seus terminais é +12V, e permanece fechada caso contrário; • VSE é o sinal de um sensor de pressão no fundo do reservatório, que produz um sinal de 2V para cada metro de coluna de água (mca) do reservatório; • O reservatório é cilíndrico, com área de seção transversal de 10m2 .
Este controle faz o reservatório ter um volume de fluído entre
I - O próximo estado de circuitos sequenciais depende não somente do estado atual, podendo depender também das entradas. II - Um flip-flop tipo D, sensível à borda positiva, copia sua entrada para a saída na borda de subida do relógio. III- Um flip-flop tipo D, sensível à borda positiva, troca seu estado quando o relógio faz uma transição do estado 1 para o estado 0.
Quais estão corretas?
I - Filtros passivos são compostos por resistores, capacitores e indutores, apresentando ganho em toda faixa de frequências. II - Filtros ativos podem apresentar ganho em diferentes faixas de frequência e usam amplificadores operacionais, resistores, capacitores e, eventualmente, indutores. III- Filtros passa-baixa permitem a passagem de sinais de baixa frequência. Os sinais acima da frequência de corte serão tanto mais atenuados quanto for a ordem do filtro.
Quais estão corretas?
Considere a expressão lógica representada como

A.(A + B) +(A + B).(A + C) +B.(A + C)
Ao empregar as leis da Álgebra Booleana, a expressão simplificada ficaria
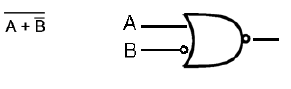
Considere a porta lógica a seguir, cuja expressão lógica é