Questões de Concurso Sobre engenharia eletrônica
Foram encontradas 3.839 questões
No que se refere aos conceitos de eletrônica analógica, julgue o item.
Em um amplificador‐fonte comum, o uso de uma resistência de degeneração de fonte causa diminuição do ganho do circuito.
Um sistema de controle automático de velocidade possui o diagrama de blocos apresentado na ilustração abaixo.
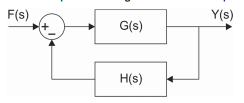
Admitindo que 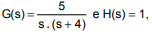 a expressão da função de transferência
a expressão da função de transferência  será
será
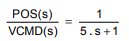
Nesse sistema, quando aplica-se um degrau de 0,0 a 100,0 [%]em VCMD, o tempo necessário para que o pistão alcance mais de 95,0% em sua posição POS é, em [s], de, aproximadamente,
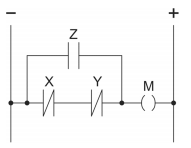
Em posse de tais informações, a expressão lógica equivalente de M será
A seguinte figura apresenta os sinais do protocolo de comunicação serial assíncrona utilizado no RS-232.
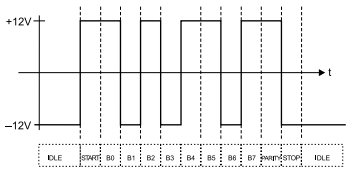
A eficiência máxima desse protocolo é, aproximadamente, de
Um determinado comportamento de um circuito lógico foi especificado com linguagens de descrição de hardware (HDL). Após o processo de síntese de alto nível, ferramentas computacionais determinaram um fluxo de dados (data path) e um fluxo de controle e estados (control path), usando RTL (register transfer logic), IP (intelectual property) Cores e outros recursos tecnológicos disponíveis em uma determinada arquitetura de FPGA. Foi realizada uma simulação digital pós-síntese que verificou que os resultados atenderam à especificação original. Entretanto, após a programação, o hardware real da FPGA não operou de forma correta, com falhas durante seu funcionamento.
A respeito desse processo, é correto afirmar que
Analise o circuito digital a seguir, composto por portas lógicas.
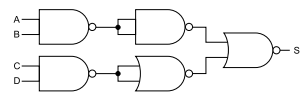
Assinale a alternativa que relaciona corretamente a saída S com as entradas A, B, C e D.
Analise o circuito a seguir, que possui dois diodos, dois capacitores e uma carga RL. Ele é alimentado por uma fonte de tensão alternada. Todos os componentes são supostos ideais.
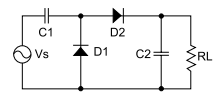
Esse circuito comporta-se como um
Deseja-se projetar um circuito que acenda um led, com a sua máxima intensidade luminosa, com uma tensão contínua de VF= 15 V, conforme mostra o circuito a seguir:
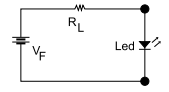
As especificações do led são: corrente para a máxima
intensidade luminosa: 20 mA, tensão de operação: 2,2 V.
Um resistor limitador RL que possa funcionar adequadamente, de valor e potência comercialmente disponíveis,
e que permita que se utilize uma corrente próxima da máxima sem ultrapassá-la é: