Questões de Engenharia Eletrônica para Concurso
Foram encontradas 3.780 questões
Analise o circuito digital a seguir, composto por portas lógicas.
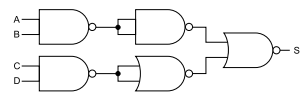
Assinale a alternativa que relaciona corretamente a saída S com as entradas A, B, C e D.
Analise o circuito a seguir, que possui dois diodos, dois capacitores e uma carga RL. Ele é alimentado por uma fonte de tensão alternada. Todos os componentes são supostos ideais.
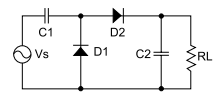
Esse circuito comporta-se como um
Deseja-se projetar um circuito que acenda um led, com a sua máxima intensidade luminosa, com uma tensão contínua de VF= 15 V, conforme mostra o circuito a seguir:
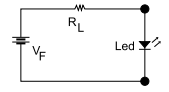
As especificações do led são: corrente para a máxima
intensidade luminosa: 20 mA, tensão de operação: 2,2 V.
Um resistor limitador RL que possa funcionar adequadamente, de valor e potência comercialmente disponíveis,
e que permita que se utilize uma corrente próxima da máxima sem ultrapassá-la é:
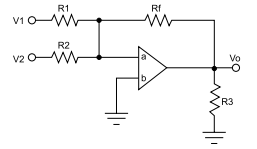
Deseja-se construir um circuito somador com um amplificador operacional ideal, no qual Rf = 2 kΩ.
Caso Vo = –2 V, V1 = 1 V e V2 = 2 V, tem-se que
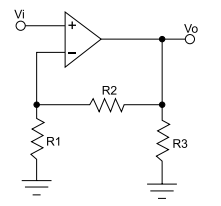
No circuito a seguir, baseado em um amplificador operacional ideal, no qual R2 = 2 kΩ, foram efetuadas as seguintes medições: Vi = 1 V e Vo = 9 V. Para que esses valores pudessem ser obtidos, o valor de
A camada inferior de cobre (bottom cooper layer) e a camada de impressão superior (top silkscreen layer) de um layout de uma placa de circuito impresso de face simples são mostradas na figura a seguir.
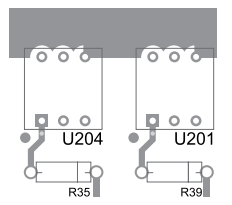
Nesse layout de placa de circuito impresso,
A partir do estabelecimento de um esquema elétrico e do diagrama de conexões, durante a elaboração do projeto de uma placa de circuito impresso, são necessárias várias etapas de design.
A respeito dessas etapas, é correto afirmar que
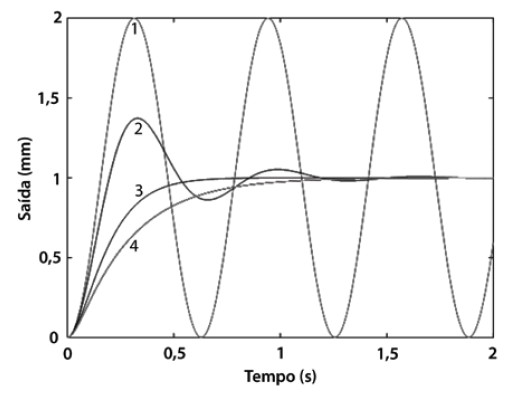
A partir da análise dessas curvas de resposta, é possível afirmar sobre o valor de ζn que:
Nos gráficos abaixo, é mostrada a resposta c(t) de um sistema dinâmico, quando submetido a uma entrada degrau r(t).
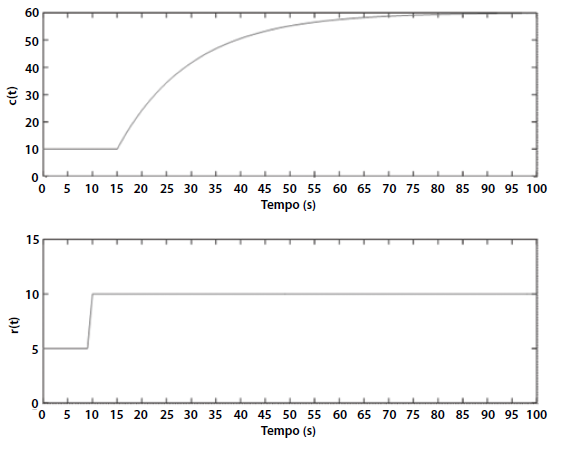
A função de transferência que melhor representa esse sistema é:
Considere o sistema abaixo:
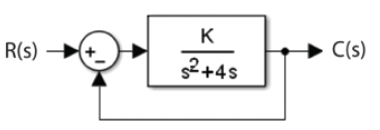
O valor de K que faz com que o sistema seja criticamente amortecido é: