Questões de Engenharia Eletrônica para Concurso
Foram encontradas 3.780 questões
Para implementar a função abaixo:
pode-se utilizar o multiplexador:
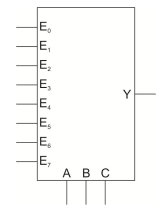
Considerando-se que X será associado à saída Y, e as variáveis A, B e C serão associadas às entradas de controle A, B e C, o
estado das entradas Ei será:
Um contador assíncrono de cinco bits foi construído a partir de flip-flops J-K, que possuem os seguintes tempos, em nanossegundos, fornecidos pelo manual de seu fabricante:
− High-to-Low Propagation Delay − tPHL (de CLK para Q) = 25
− Low-to-High Propagation Delay −tPLH (de CLK para Q) = 10
A frequência máxima de operação desse contador, considerando o pior caso é, em MHz:
Deseja-se projetar um circuito lógico combinatório com as entradas A, B e C, e a saída X, de acordo com a tabela-verdade abaixo.
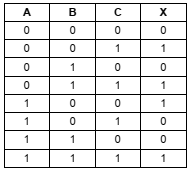
Uma expressão simplificada que pode ser utilizada para implementar o circuito final é
Pretende-se utilizar a saída de um dos inversores circuito integrado 74AS04 para fornecer um sinal que será utilizado como entrada de diversos circuitos integrados similares da família 74ALS.
As características desses circuitos integrados são:
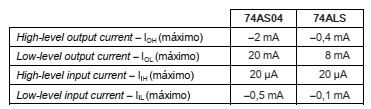
O número máximo de entradas dos circuitos integrados da família 74ALS, que poderão ser acionados pela saída do inversor
74AS04 sem sobrecarregar a sua saída, é
Considere o circuito abaixo construído a partir de portas lógicas típicas.
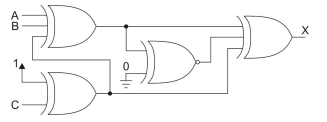
A saída X apresentará o valor
Considere a função abaixo:
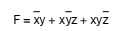
A função é equivalente a
Considere três números apresentados abaixo, cada um escrito em um sistema de numeração diferente:
190,C hexadecimal.
620,6 octal.
110010000,11 binário.
Sobre esses números é correto afirmar que
Nos circuitos lógicos abaixo, considere que A tem valor Falso e B tem valor Verdadeiro.

Qual o valor booleano final de cada circuito?
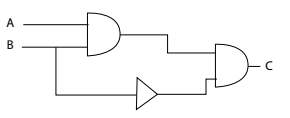
Dado o circuito lógico representado abaixo e as entradas A e B, defina a expressão representada pela saída C:
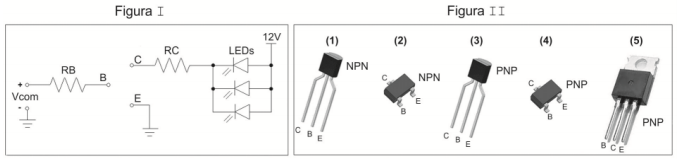
Sabendo que Vcom é um sinal binário (0V ou 5V) proveniente de um Arduino, que os resistores RB e RC serão devidamente dimensionados, de modo que o transistor selecionado opere como chave (dentro de suas características elétricas) com os pontos elétricos definidos pelo esquema elétrico (B = base, C = coletor e E = emissor), para o funcionamento da placa
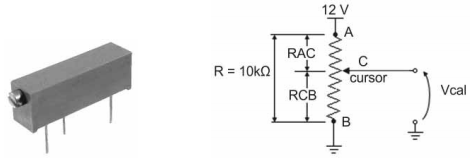 Admitindo como condição inicial de calibração que o trimpot esteja inicialmente zerado (RAC = 0 Ω e RCB = 10 kΩ), que
aumente RAC girando o parafuso do cursor de ajuste no sentido horário, então é um dado correto que pode ser inserido na
tabela operacional que está sendo elaborada:
Admitindo como condição inicial de calibração que o trimpot esteja inicialmente zerado (RAC = 0 Ω e RCB = 10 kΩ), que
aumente RAC girando o parafuso do cursor de ajuste no sentido horário, então é um dado correto que pode ser inserido na
tabela operacional que está sendo elaborada: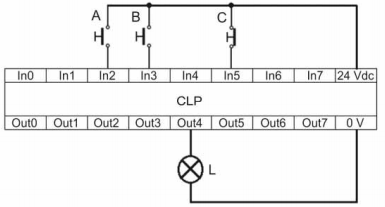 Ainda conforme a figura acima, duas entradas do CLP recebem duas chaves tipo pushbutton NA (A e B), uma terceira entrada
recebe uma chave tipo pushbutton tipo NF (C) e uma saída recebe uma lâmpada que acende em 24V (L), pretende-se
implementar a seguinte lógica:
Ainda conforme a figura acima, duas entradas do CLP recebem duas chaves tipo pushbutton NA (A e B), uma terceira entrada
recebe uma chave tipo pushbutton tipo NF (C) e uma saída recebe uma lâmpada que acende em 24V (L), pretende-se
implementar a seguinte lógica:
− L nunca acende na condição de C fechado. − L deve acender se A ou B estiverem fechadas.
Para isso foram fornecidas as quatro opções de programação em diagrama ladder mostradas abaixo.

Com o exposto acima, é correto afirmar APENAS que:
Na figura abaixo estão representados dois circuitos eletrônicos (1 e 2), para duas entradas de um CLP, as quais recebem os sinais K1 (para o circuito 1) e K2 (para o circuito 2), estas que por sua vez são provenientes de dois sensores, cujos circuitos transistorizados de saída são S1 (para o circuito 1) e S2 (para o circuito 2).
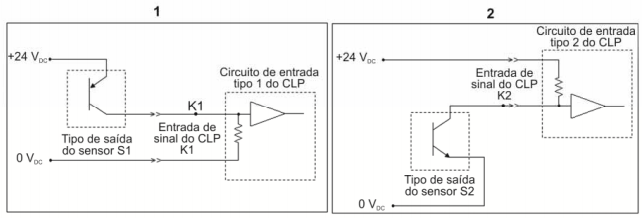
Admitindo que os transistores das saídas dos sensores (S1 e S2) operam como chaves (corte ou saturação), ou seja: sensor
ativo corresponde a transistor saturado e sensor desativo corresponde a transistor cortado, é correto afirmar: