Questões de Engenharia Eletrônica para Concurso
Foram encontradas 3.780 questões

 .
. 
No que se refere à teoria dos materiais semicondutores e aos componentes fabricados com o uso desses materiais, julgue o item subsequente.
Um dos processos para se produzir um semicondutor de silício
do tipo N consiste em dopar um material semicondutor
intrínseco de silício com impurezas, de forma que determinada
quantidade de átomos de silício na estrutura cristalina sejam
substituídos por átomos de elementos químicos adequados
para o processo, com cinco elétrons na banda de valência. Esse
processo de modificação do semicondutor intrínseco permite
gerar um material em que os portadores majoritários são os
elétrons.
No que se refere à teoria dos materiais semicondutores e aos componentes fabricados com o uso desses materiais, julgue o item subsequente.
Para que o diodo semicondutor retificador contendo uma
junção PN esteja em polarização reversa, é necessário que o
potencial elétrico no catodo seja maior que o do anodo.
No que se refere à teoria dos materiais semicondutores e aos componentes fabricados com o uso desses materiais, julgue o item subsequente.
No transistor de efeito de campo NMOS do tipo depleção, o
substrato usado para a fabricação é um semicondutor do tipo
N, e as regiões da fonte e do dreno são implementados como
semicondutores do tipo P.
No que se refere à teoria dos materiais semicondutores e aos componentes fabricados com o uso desses materiais, julgue o item subsequente.
Nos transistores do tipo PNP, os portadores majoritários no
emissor e no coletor são as lacunas e, na base, são os elétrons.
No que se refere à teoria dos materiais semicondutores e aos componentes fabricados com o uso desses materiais, julgue o item subsequente.
Nos transistores de uso geral do tipo NPN, a base, que deve ser
fabricada com a maior largura possível, apresenta um grau de
dopagem bem mais alto do que o coletor, característica essa
importante por favorecer a minimização da recombinação dos
portadores majoritários e minoritários na base.
No que se refere à teoria dos materiais semicondutores e aos componentes fabricados com o uso desses materiais, julgue o item subsequente.
Para que transistores bipolares do tipo NPN operem na região
ativa, é necessário que a junção entre o coletor e a base seja
submetida à polarização reversa, e a junção entre base e
emissor seja polarizada diretamente.
Com relação ao comportamento de campos elétricos e magnéticos na matéria e às propriedades térmicas da matéria, julgue o item que se segue.
Em um capacitor de placas paralelas separadas por vácuo, a
capacitância, que é igual a diferença de potencial entre as duas
placas dividida pela carga armazenada no capacitor, diminuirá
se o vácuo for substituído por uma substância cerâmica, pois
a constante dielétrica do vácuo é a maior possível.
Abaixo, vê-se a representação de um circuito lógico.
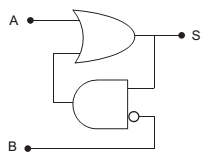
Esse circuito lógico corresponde à simplificação da expressão
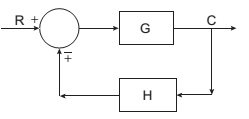
No diagrama de blocos representado abaixo, verificam-se os componentes principais de um sistema de controle realimentado.
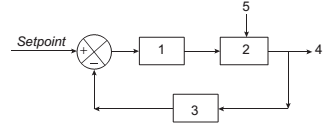
A sequência 1, 2, 3, 4 e 5 dos elementos indicados no
diagrama é, respectivamente,
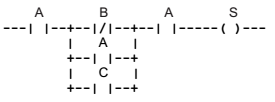
No diagrama Ladder acima, a saída S corresponde a
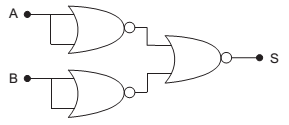
Observe o diagrama Ladder abaixo.
A saída S desse diagrama corresponde a
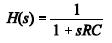
Um sistema de retroação unitária que pode ser apresentado
no lugar do sistema de retroação acima é:
O protocolo HART® foi desenvolvido pela Rosemount Inc. e significa Via de Dados Endereçável por Transdutor Remoto que vem do inglês Highway Addressable Remote Transducer.
Esse protocolo
No diagrama Ladder abaixo, “A” corresponde ao sinal do sensor no campo, e “B”, ao valor esperado.
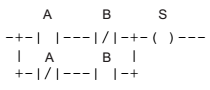
Utilizando-se o diagrama Ladder, juntamente com o conceito
de falha segura, qual o valor da saída S quando o
sinal vindo do sensor no campo é zero?
O gráfico abaixo representa a resposta a uma dada alteração de carga.
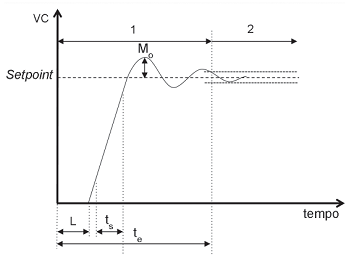
As inscrições nesse gráfico podem ser descritas:
Um técnico de manutenção é chamado para analisar e corrigir uma falha que ocorreu em um dos CLPs de uma planta de destilação. Ao estudar o problema e após testar alguns componentes, o técnico concluiu que um dos cartões do CLP havia queimado, procedendo imediatamente à sua substituição. A partir disso, a planta voltou a operar normalmente.
Qual o tipo de manutenção que foi realizada por esse técnico?