Questões de Concurso Sobre engenharia mecatrônica
Foram encontradas 240 questões
( ) Os higrômetros de psicrômetro utilizam dois termômetros, um seco e outro com um pavio úmido, para medir a umidade relativa do ar.
( ) Higrômetros de condutividade térmica medem diretamente a quantidade de água presente no ar.
( ) Higrômetros de capacitância utilizam um sensor de resistência que varia com a umidade relativa do ar.
Está correto o que se apresenta em:
1. Termopares
2. Termistores
3. Termômetros de Líquido em Vidro
4. Termografia infravermelha
( ) baseia-se na expansão e contração de um líquido termométrico em resposta as mudanças de temperatura.
( ) envolve a captura de imagens térmicas, cuja temperatura é determinada pela radiação emitida pelo objeto.
( ) apresentam variação do valor da resistência a medida em que há variação de temperatura.
( ) uma diferença de potencial elétrico é gerada entre as junções do dispositivo composto por dois fios de diferentes metais unidos em uma extremidade, a qual é proporcional a temperatura.
Assinale a opção que apresenta a relação correta, na ordem apresentada.
I. A tenacidade está relacionada com a energia necessária para romper o material.
II. A tenacidade não está relacionada com a área sob a curva tensão versus deformação do material.
III. Um material dúctil com a mesma resistência de um material frágil requerer maior energia para ser rompido e, portanto, é mais tenaz.
IV. A tenacidade pode ser definida como sendo a capacidade do material absorver energia quando deformado elasticamente.
Está correto o que se afirma em:
Acerca de redes industriais, julgue o item subsequente.
Em redes industriais, podem ser utilizados equipamentos
como atuadores e computadores, entretanto os sensores não
são permitidos, por suas falhas de segurança.
No que se refere à sintonia do controlador proporcional-integral-derivativo (PID), julgue o item a seguir.
derivativa do cálculo.
80 Um controlador PID calcula, inicialmente, o erro entre a
variável controlada e seu valor desejado.
No que se refere à sintonia do controlador proporcional-integral-derivativo (PID), julgue o item a seguir.
No algoritmo de um controlador PID digital, se houver erro
no cálculo, haverá desalinhamento apenas na etapa
derivativa do cálculo.
Na etapa proporcional do controle PID, o sinal de controle aplicado a cada instante à planta é proporcional à amplitude do valor do sinal de erro.
No que se refere a controle de processos, julgue o item a seguir, relativos a controle liga-desliga.
Um termostato em um sistema de aquecimento simples é um
exemplo de um controlador liga-desliga.
Em controle liga-desliga de processos, o ciclo contínuo da variável controlada é considerado uma vantagem, pois, com o tempo, não há desgaste do elemento final de controle.
Julgue o item a seguir, relativos a controladores lógicos programáveis (CLP).
Um CLP é indicado para lidar com sistemas de automação
caracterizados por eventos contínuos no tempo.
Julgue o item a seguir, relativos a controladores lógicos programáveis (CLP).
Os CLP têm capacidade de comunicação de dados via canais
seriais.
Julgue o item a seguir, relativos a controladores lógicos programáveis (CLP).
Devido a suas características, um CLP não é capaz de lidar
com variáveis analógicas, tampouco com tensão elétrica.
Assinale a alternativa que preencha corretamente a lacuna. Dentro da linguagem de programação e diagramas Ladder, a instrução ______ tem o seguinte comportamento:
Energizar uma saída com retenção.
Analise a figura abaixo.
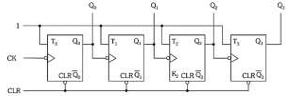
Assinale a alternativa que corresponda à montagem apresentada.


Assinale a alternativa que apresenta as saídas corretas, na mesma ordem em que são apresentadas.
Observação: Considere os CIs alimentados corretamente e em pleno funcionamento.
( ) Realimentação por corrente.
( ) Realimentação por tacogerador.
( ) Realimentação por encoder.
( ) Realimentação I x R.
Analise as afirmativas acima dê valores Verdadeiro (V) ou Falso (F) e assinale a alternativa que apresenta a sequência correta de cima para baixo.
Assinale a alternativa corretamente a lacuna.