Questões de Concurso
Sobre robótica em engenharia mecatrônica
Foram encontradas 35 questões
Com relação a técnicas de processamento digital de imagens em visão computacional aplicada à robótica, julgue o próximo item.
Filtros convolucionais não podem ser utilizados, por
exemplo, na detecção de bordas na imagem de uma câmera
de um sistema detector de embalagens.
O objetivo do servo-controle visual é ajustar a postura, ou seja, a posição e a orientação da ferramenta de um robô em relação a algum objeto-alvo de referência, a partir da extração de características de imagens. A respeito de servo-controle visual de robôs, julgue o item a seguir.
Em servo-controle visual, transformações entre sistemas de
referência distintos podem ser caracterizadas por matrizes de
transformação homogênea, que contemplam ações de
translação, rotação e escalonamento.
O objetivo do servo-controle visual é ajustar a postura, ou seja, a posição e a orientação da ferramenta de um robô em relação a algum objeto-alvo de referência, a partir da extração de características de imagens. A respeito de servo-controle visual de robôs, julgue o item a seguir.
O servo-controle visual estabelece um sistema de controle
em malha fechada, em que o processamento de imagens gera
informações a serem realimentadas para o controlador.
O objetivo do servo-controle visual é ajustar a postura, ou seja, a posição e a orientação da ferramenta de um robô em relação a algum objeto-alvo de referência, a partir da extração de características de imagens. A respeito de servo-controle visual de robôs, julgue o item a seguir.
No servo-controle visual baseado em posição, omite-se a
estimação da postura, e as características da imagem são
usadas diretamente, ou seja, o controle é realizado no espaço
bidimensional de coordenadas da imagem.
O objetivo do servo-controle visual é ajustar a postura, ou seja, a posição e a orientação da ferramenta de um robô em relação a algum objeto-alvo de referência, a partir da extração de características de imagens. A respeito de servo-controle visual de robôs, julgue o item a seguir.
Algoritmos para estimação da postura do objeto de
referência em relação à câmera são computacionalmente
pesados e dependem criticamente da precisão de calibração
da câmera e do modelo geométrico do objeto.
O objetivo do servo-controle visual é ajustar a postura, ou seja, a posição e a orientação da ferramenta de um robô em relação a algum objeto-alvo de referência, a partir da extração de características de imagens. A respeito de servo-controle visual de robôs, julgue o item a seguir.
Para implementação de controle servo-visual, é preciso que a
câmera esteja fixada na ferramenta de trabalho do robô.
O objetivo do servo-controle visual é ajustar a postura, ou seja, a posição e a orientação da ferramenta de um robô em relação a algum objeto-alvo de referência, a partir da extração de características de imagens. A respeito de servo-controle visual de robôs, julgue o item a seguir.
Servo-controle visual não permite o rastreamento de
objetos-alvo que estejam em movimento.
Acerca da interação humano-robô (IHR), julgue o item subsequente.
Unidades de medição inercial são utilizadas para
sensoriamento de informações acústicas provenientes do
usuário.
Acerca da interação humano-robô (IHR), julgue o item subsequente.
No âmbito de IHR, a técnica de personas corresponde a uma
ferramenta de desenvolvimento.
Acerca da interação humano-robô (IHR), julgue o item subsequente.
No conceito de IHR centrada no robô, avalia-se como o robô
pode completar suas especificações de tarefas de maneira
que seja aceitável e confortável aos humanos.
Acerca da interação humano-robô (IHR), julgue o item subsequente.
A IHR pode se dar por meio vocal, visual e tátil.
Acerca da interação humano-robô (IHR), julgue o item subsequente.
Certos tipos de robôs de serviço também podem ser
desenvolvidos segundo a abordagem IHR.
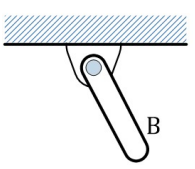
Quantos são os graus de liberdade da barra B mostrada na figura?
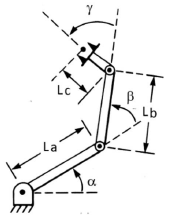
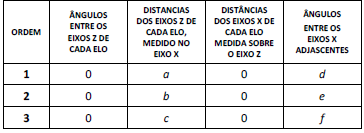 De acordo com o Modelo D-H, considerando que os eixos X e
Y estão no plano das articulações do braço do robô, as letras a, b,
c, d, e, f da tabela são, respectivamente,
De acordo com o Modelo D-H, considerando que os eixos X e
Y estão no plano das articulações do braço do robô, as letras a, b,
c, d, e, f da tabela são, respectivamente,Tempo verificado entre a ocorrência de uma alteração no processo e a sua percepção pelo elemento sensor:
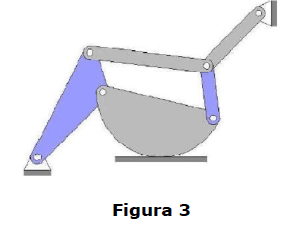
Calcule os graus de liberdade (GDL) do mecanismo da Figura 3 abaixo.
Strain gage ou extensômetros de deformação elétricos são sensores empregados em células de carga para a medição de força e massa. Com relação ao seu princípio de funcionamento dos sensores e da célula de carga, avalie o acerto das afirmações adiante e marque com V as verdadeiras e com F as falsas.
( ) Os sensores operam por princípios resistivos
( ) Para uma célula de carga operando em ponte completa são necessários no mínimo 8 sensores
( ) Quando sofrem alongamento os sensores diminuem a sua resistência elétrica
( ) A sensibilidade da célula de carga depende da tensão elétrica de alimentação
( ) O sinal de saída de uma célula de carga é da ordem de volts, não necessitando de amplificação
Marque a opção que contenha a sequência CORRETA, de cima para baixo:
Considere a tabela abaixo que contém manipuladores robóticos articulados de base fixa indicados pelas letras A, B, C e D.
Adaptado de B. Siciliano, L. Sciavicco, L. Villani, G. Oriolo Robotics: modelling, planning and control, advanced textbooks in control and signal processing Springer, London, UK (2009)
Considerando o indicativo das flechas como um grau de liberdade de movimento (rotativo ou linear), são feitas as seguintes afirmações.
I. Os manipuladores B e C possuem o mesmo formato de área de trabalho, ou seja, um paralelepípedo.
II. O manipulador D possui área de trabalho no formato de cilindro
III. O manipulador A possui área de trabalho no formato de cilindro.
Assinale a opção CORRETA:
A partir das seguintes afirmações sobre sensores e transdutores para medição de posição:
I. Os potenciômetros, fabricados em diversos tamanhos e formatos, podem ser utilizados como sensores de posição;
II. Os encoders incrementais são dispositivos utilizados para medir posição ou velocidade angular e sua resolução é dada pelo número de pulsos por revolução;
III. O transformador diferencial linear variável (LVDT, do inglês Linear Variable Differential Transformer) é um transdutor de deslocamento utilizado, por exemplo, em válvulas proporcionais pneumáticas.
Pode-se afirmar que