Questões de Concurso
Sobre elétrica em mecatrônica em mecatrônica
Foram encontradas 23 questões
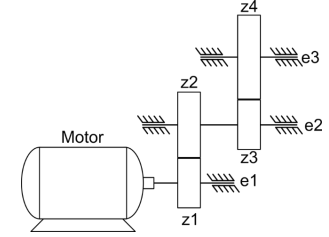
Considere as seguintes equações de acoplamento de duas engrenagens:
a) i = zs/ze ; b) ωe/ωs = i ; c) Te/Ts = 1/i ;
onde i é a relação de transmissão, zs é o número de dentes da engrenagem de saída, ze é o número de dentes da engrenagem de entrada, ωs é a velocidade angular na engrenagem de saída, ωe é a velocidade angular da engrenagem de entrada, Ts é o torque sobre o eixo da engrenagem de saída e Te é o torque sobre o eixo da engrenagem de entrada.
Para um dado valor de velocidade angular ω1 e torque T1 gerados pelo motor sobre e1, indique se as afirmativas a seguir são verdadeiras (V) ou falsas (F) e assinale a alternativa com a sequência correta de cima para baixo.
( ) A velocidade angular resultante sobre e2 é a metade da velocidade angular sobre e1. ( ) A velocidade angular sobre e3 é 1/2 da velocidade angular sobre o eixo e2. ( ) O torque sobre o eixo e3 é duas vezes maior do torque sobre eixo e2. ( ) A relação de transmissão entre os eixos e3 e e1 é i = 4. ( ) Ao diminuir o número de dentes da primeira engrenagem para z1 = 12, a relação de transmissão entre os eixos e1 e e3 é amplificada para 12.
( ) Os mancais são classificados como deslizantes ou de rolamento.
( ) Mancais de rolamento são aplicados quando se deseja reduzir o atrito na partida em eixos em movimentos rotativos.
( ) Os mancais de deslizamento dispõem de roletes, sendo aplicados em máquinas pesadas.
( ) Os rolamentos são classificados, de acordo a direção das forças que suportam, em radiais ou de tração.
( ) Em situações em que desalinhamentos de eixos ou montagem possam ocorrer, é recomendada a utilização de rolamentos autocompensadores de esferas.
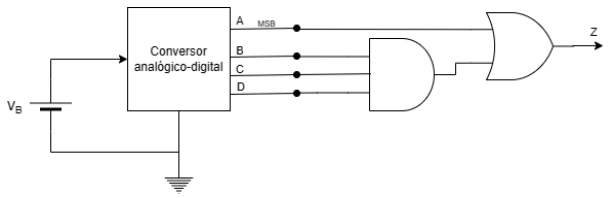
A saída Z é ativada em nível ALTO se e somente se a tensão da bateria VB for maior que:
Considere o seguinte circuito digital, composto por três portas lógicas NAND:
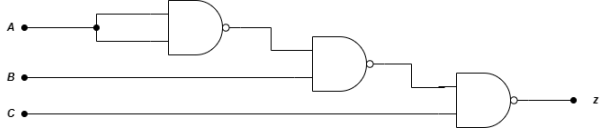
Qual expressão booleana é implementada por esse circuito?
I. Apenas dois wattímetros são necessários para medir a potência média total absorvida por uma carga trifásica.
II. A sequência de fase é a ordem em que as tensões das fases de um gerador trifásico ocorrem em relação ao tempo. Em uma sequência abc de tensões balanceadas de um gerador trifásico, a tensão da fase A está adiantada 120 graus da tensão da fase B, que, por sua vez, está 120 graus adiantada da tensão da fase C.
III. Em um sistema trifásico, tanto a fonte quanto a carga podem ser conectadas em triângulo ou em estrela.
IV. Tensões de fase balanceadas são iguais em amplitude e fora de fase uma das outras em 120 graus.
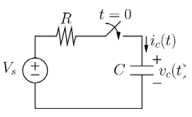
I. A equação do capacitor é dada por i= C dv/dt, em que C é a capacitância, cuja unidade de medida é o farad (F).
II. A equação do indutor é dada por v = L di/dt, em que L é a indutância, cuja unidade de medida é o henry (H).
III. A capacitância equivalente, Ceq, de dois capacitores em conectados em série, C1 e C2, é dada por Ceq= C1 + C2.
IV. Capacitores são usados para armazenar energia na forma de campo elétrico, enquanto indutores podem armazenar energia na forma de campo magnético.
V. A energia armazenada em um capacitor é dada por wC = 1/2 Cv2 e a energia armazenada por um indutor é dada por wL = 1/2 Li2.
Desprezando-se a indutância da armadura e atritos viscosos norotor, pode-se obter um modelo de primeira ordem para omotor, na forma da função de transferência:
Ω(s)/ V(s) = A/
 + 1
+ 1 em que Ω(s) e V(s) são as transformadas de Laplace davelocidade angular do rotor ω(t) e da tensão da armadura v(t),respectivamente.
Os parâmetros do modelo A ,em rad/s.V , e
 em segundos, são,respectivamente,
em segundos, são,respectivamente, A respeito de relés e contatores considere:
“Os relés têm funções auxiliares como os contatores auxiliares, mas são e têm configuração de contato diferente do contator, possuindo um ponto comum associado a um contato normalmente aberto e outro fechado. Além disso, os relés têm um tempo de manobra que os contatores, isto é, são_” (NASCIMENTO, 2013)
Assinale a alternativa que preencha correta e respectivamente as lacunas:
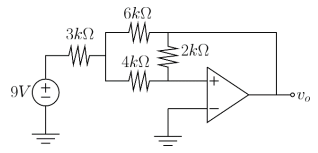
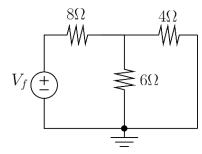
Analise o seguinte circuito.
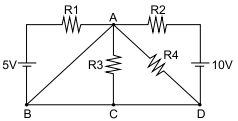
De acordo com as informações sobre o circuito, o valor
da queda de tensão no resistor R2, em volts (V), é:
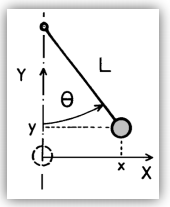
Para movimentar um manipulador robótico articulado para uma dada posição no espaço, é preciso encontrar uma sequência de deslocamentos angulares para suas articulações. Isso pode ser feito com a utilização da inversa da matriz jacobiana do manipulador, que representa as variações de posição do manipulador com relação aos ângulos das articulações. Considerando o manipulador ao lado, a matriz jacobiana desse manipulador está representada em