Para movimentar um manipulador robótico articulado para uma ...
Próximas questões
Com base no mesmo assunto
Ano: 2018
Banca:
COMPERVE - UFRN
Órgão:
UFRN
Prova:
COMPERVE - 2018 - UFRN - Engenheiro - Engenharia da Computação |
Q941062
Mecatrônica
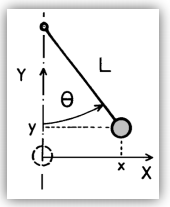
Para movimentar um manipulador robótico articulado para uma dada posição no espaço, é preciso encontrar uma sequência de deslocamentos angulares para suas articulações. Isso pode ser feito com a utilização da inversa da matriz jacobiana do manipulador, que representa as variações de posição do manipulador com relação aos ângulos das articulações. Considerando o manipulador ao lado, a matriz jacobiana desse manipulador está representada em