Questões de Concurso
Sobre estrutura de dados em algoritmos e estrutura de dados
Foram encontradas 1.402 questões
Considere o algoritmo a seguir, apresentado na forma de uma pseudolinguagem e que implementa uma certa funcionalidade, para responder às questões de números 50 e 51.
Início
- as [
- asd Tipo TM = matriz[1..4, 1..4] de inteiros;
- asdas Inteiro: c, i, j, k;
- asda TM: Mat;
- asdas c ← 1;
- asdasd Para i de 1 até 4 faça
- asd[
- as Se (c é ímpar)
- asd[
- asas Então
- asd[ c ← c + 3*i;
- asd Para j de 1 até 4 faça
- ad[
- asdMat[i,j] ← i + j + c;
- a]
- ,]
- asas Senão
- ,[
- asasddc ← c + 2*i + 1
- asdasd; Para k de 1 até 4 faça
- [
- asdasdiiaMat[i,k] ← i + k - c;
- aaaad]
- aasa]
- aaa]
- ii,,]
- ,]
- Fim.
O maior e o menor valor armazenados após a execução do algoritmo na matriz Mat são, respectivamente,
Considere o algoritmo a seguir, apresentado na forma de uma pseudolinguagem e que implementa uma certa funcionalidade, para responder às questões de números 50 e 51.
Início
- as [
- asd Tipo TM = matriz[1..4, 1..4] de inteiros;
- asdas Inteiro: c, i, j, k;
- asda TM: Mat;
- asdas c ← 1;
- asdasd Para i de 1 até 4 faça
- asd[
- as Se (c é ímpar)
- asd[
- asas Então
- asd[ c ← c + 3*i;
- asd Para j de 1 até 4 faça
- ad[
- asdMat[i,j] ← i + j + c;
- a]
- ,]
- asas Senão
- ,[
- asasddc ← c + 2*i + 1
- asdasd; Para k de 1 até 4 faça
- [
- asdasdiiaMat[i,k] ← i + k - c;
- aaaad]
- aasa]
- aaa]
- ii,,]
- ,]
- Fim.
Após a execução do algoritmo, o número de posições da matriz Mat que foram atualizadas é igual a
Quanto à construção de algoritmos e estrutura de dados, analise as assertivas abaixo.
I. As estruturas de dados permitem armazenar dados de forma adequada para serem processados no computador.
II. A eficiência de tempo e de espaço de armazenamento para o tipo de dados abstratos são questões relacionadas à implementação.
III. Um tipo de dado especifica um conjunto de valores e as operações que podem ser realizadas sobre tais valores.
É correto o que se afirma em
Quanto à construção de algoritmos e estrutura de dados, marque V para verdadeiro ou F para falso e, em seguida, assinale a alternativa que apresenta a sequência correta.
( ) O Método da Inserção pode ser mais eficiente do que algoritmos que tenham comportamento assintótico mais eficiente, desde que o arquivo contenha menos de 20 elementos.
( ) O Método Quicksort é o algoritmo mais eficiente para uma grande variedade de situações envolvendo ordenações.
( ) Para os casos em que os arquivos possuam milhares de elementos, é melhor utilizar o método da bolha para ordenar seus elementos.
( ) Para os casos de ordenação de arquivos com mais de 25 elementos, o algoritmo de Seleção garante até 20% de melhoria no desempenho da maioria das aplicações.
Quanto à construção de algoritmos e estrutura de dados, assinale a alternativa que obedece corretamente à condição de heap para um array A.
4 8 1 3 8 1 3 1 3 5 1 3
Elaborado pelo(a) autor(a).
Considerando a representação de como a estrutura se comporta durante as operações sucessivas de adição e remoção de elementos, infere-se que a estrutura de dados é uma:
Um problema computacional é dito NP-completo quando
No que se refere ao uso de tabelas de hash para armazenamento de informação, assinale a alternativa correta.
Levando em consideração que os dados possuem outliers que podem afetar negativamente a normalização, qual técnica de normalização seria adequada?
A Figura abaixo exibe uma árvore binária de busca balanceada.
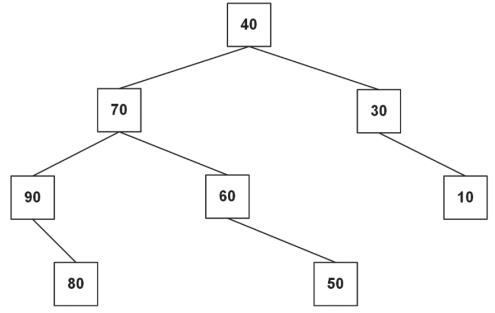
Um novo número inteiro foi inserido nessa árvore sem que suas propriedades tenham sido alteradas. Além disso, nenhuma transformação foi necessária para mantê-la balanceada.
Qual foi o número inteiro inserido?
( ) Estruturas sequenciais
( ) Estruturas de decisão
( ) Estruturas de interação
( ) Estruturas de repetição
Assinale a alternativa que apresenta a sequência correta de cima para baixo.
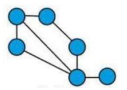
A tipologia na imagem acima é a: